 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Makes Good Synthetic Training Data for Learning Disparity and Optical Flow Estimation?
Mar 22, 2018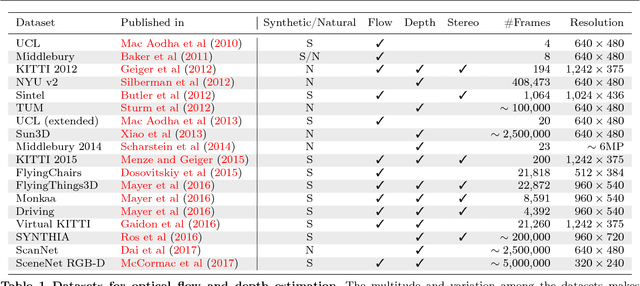
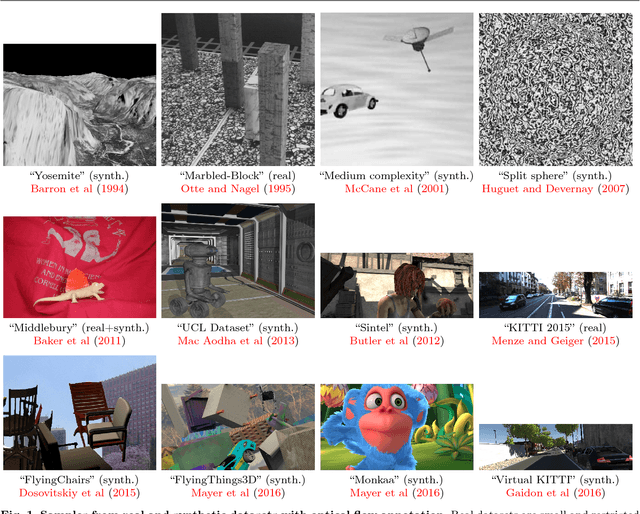
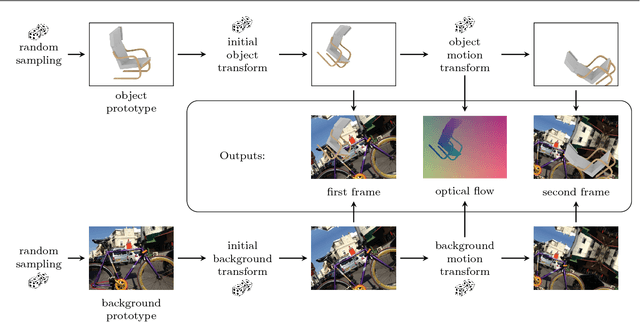

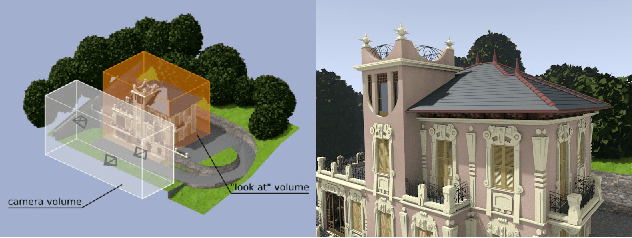
The finding that very large networks can be trained efficiently and reliably has led to a paradigm shift in computer vision from engineered solutions to learning formulations. As a result, the research challenge shifts from devising algorithms to creating suitable and abundant training data for supervised learning. How to efficiently create such training data? The dominant data acquisition method in visual recognition is based on web data and manual annotation. Yet, for many computer vision problems, such as stereo or optical flow estimation, this approach is not feasible because humans cannot manually enter a pixel-accurate flow field. In this paper, we promote the use of synthetically generated data for the purpose of training deep networks on such tasks.We suggest multiple ways to generate such data and evaluate the influence of dataset properties on the performance and generalization properties of the resulting networks. We also demonstrate the benefit of learning schedules that use different types of data at selected stages of the training process.
DeMoN: Depth and Motion Network for Learning Monocular Stereo
Apr 11, 2017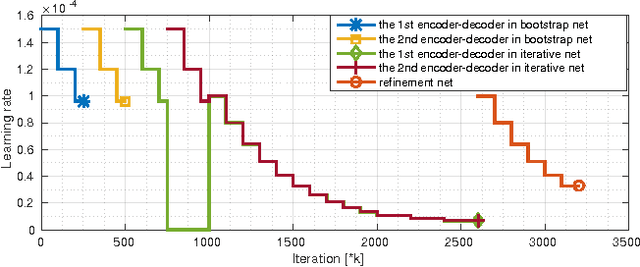

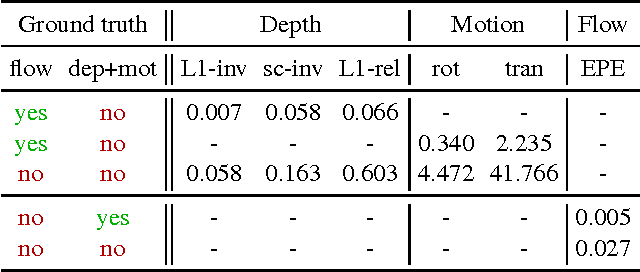
In this paper we formulate structure from motion as a learning problem. We train a convolutional network end-to-end to compute depth and camera motion from successive, unconstrained image pairs. The architecture is composed of multiple stacked encoder-decoder networks, the core part being an iterative network that is able to improve its own predictions. The network estimates not only depth and motion, but additionally surface normals, optical flow between the images and confidence of the matching. A crucial component of the approach is a training loss based on spatial relative differences. Compared to traditional two-frame structure from motion methods, results are more accurate and more robust. In contrast to the popular depth-from-single-image networks, DeMoN learns the concept of matching and, thus, better generalizes to structures not seen during training.
FlowNet 2.0: Evolution of Optical Flow Estimation with Deep Networks
Dec 06, 2016
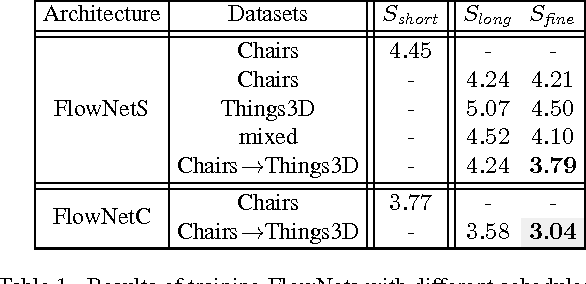
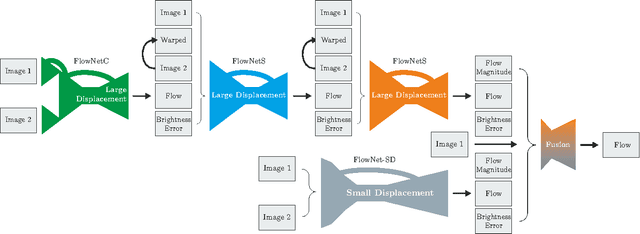
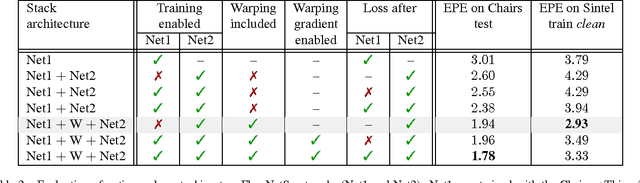
The FlowNet demonstrated that optical flow estimation can be cast as a learning problem. However, the state of the art with regard to the quality of the flow has still been defined by traditional methods. Particularly on small displacements and real-world data, FlowNet cannot compete with variational methods. In this paper, we advance the concept of end-to-end learning of optical flow and make it work really well. The large improvements in quality and speed are caused by three major contributions: first, we focus on the training data and show that the schedule of presenting data during training is very important. Second, we develop a stacked architecture that includes warping of the second image with intermediate optical flow. Third, we elaborate on small displacements by introducing a sub-network specializing on small motions. FlowNet 2.0 is only marginally slower than the original FlowNet but decreases the estimation error by more than 50%. It performs on par with state-of-the-art methods, while running at interactive frame rates. Moreover, we present faster variants that allow optical flow computation at up to 140fps with accuracy matching the original FlowNet.
A Large Dataset to Train Convolutional Networks for Disparity, Optical Flow, and Scene Flow Estimation
Dec 07, 2015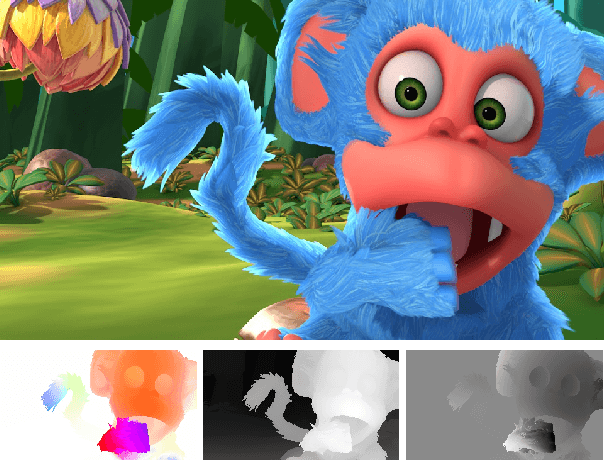
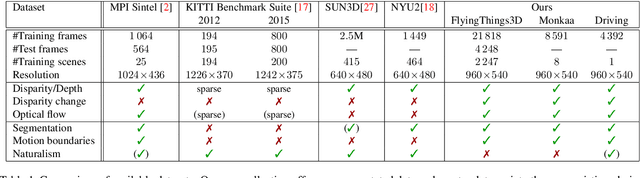
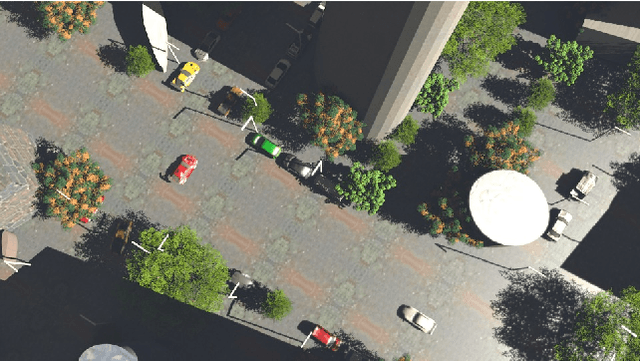
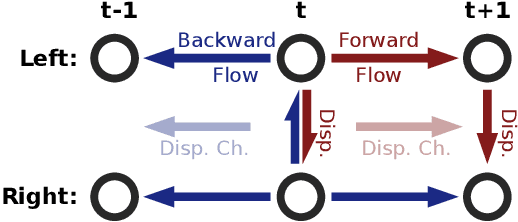
Recent work has shown that optical flow estimation can be formulated as a supervised learning task and can be successfully solved with convolutional networks. Training of the so-called FlowNet was enabled by a large synthetically generated dataset. The present paper extends the concept of optical flow estimation via convolutional networks to disparity and scene flow estimation. To this end, we propose three synthetic stereo video datasets with sufficient realism, variation, and size to successfully train large networks. Our datasets are the first large-scale datasets to enable training and evaluating scene flow methods. Besides the datasets, we present a convolutional network for real-time disparity estimation that provides state-of-the-art results. By combining a flow and disparity estimation network and training it jointly, we demonstrate the first scene flow estimation with a convolutional network.