 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Prediction in Multi-User Settings: An Evaluation
Dec 08, 2023Typically, machine learning models are trained and evaluated without making any distinction between users (e.g, using traditional hold-out and cross-validation). However, this produces inaccurate performance metrics estimates in multi-user settings. That is, situations where the data were collected by multiple users with different characteristics (e.g., age, gender, height, etc.) which is very common in user computer interaction and medical applications. For these types of scenarios model evaluation strategies that provide better performance estimates have been proposed such as mixed, user-independent, user-dependent, and user-adaptive models. Although those strategies are better suited for multi-user systems, they are typically assessed with respect to performance metrics that capture the overall behavior of the models and do not provide any performance guarantees for individual predictions nor they provide any feedback about the predictions' uncertainty. In order to overcome those limitations, in this work we evaluated the conformal prediction framework in several multi-user settings. Conformal prediction is a model agnostic method that provides confidence guarantees on the predictions, thus, increasing the trustworthiness and robustness of the models. We conducted extensive experiments using different evaluation strategies and found significant differences in terms of conformal performance measures. We also proposed several visualizations based on matrices, graphs, and charts that capture different aspects of the resulting prediction sets.
An Empirical Study of Uncertainty Estimation Techniques for Detecting Drift in Data Streams
Nov 22, 2023In safety-critical domains such as autonomous driving and medical diagnosis, the reliability of machine learning models is crucial. One significant challenge to reliability is concept drift, which can cause model deterioration over time. Traditionally, drift detectors rely on true labels, which are often scarce and costly. This study conducts a comprehensive empirical evaluation of using uncertainty values as substitutes for error rates in detecting drifts, aiming to alleviate the reliance on labeled post-deployment data. We examine five uncertainty estimation methods in conjunction with the ADWIN detector across seven real-world datasets. Our results reveal that while the SWAG method exhibits superior calibration, the overall accuracy in detecting drifts is not notably impacted by the choice of uncertainty estimation method, with even the most basic method demonstrating competitive performance. These findings offer valuable insights into the practical applicability of uncertainty-based drift detection in real-world, safety-critical applications.
Long Range Object-Level Monocular Depth Estimation for UAVs
Feb 17, 2023Computer vision-based object detection is a key modality for advanced Detect-And-Avoid systems that allow for autonomous flight missions of UAVs. While standard object detection frameworks do not predict the actual depth of an object, this information is crucial to avoid collisions. In this paper, we propose several novel extensions to state-of-the-art methods for monocular object detection from images at long range. Firstly, we propose Sigmoid and ReLU-like encodings when modeling depth estimation as a regression task. Secondly, we frame the depth estimation as a classification problem and introduce a Soft-Argmax function in the calculation of the training loss. The extensions are exemplarily applied to the YOLOX object detection framework. We evaluate the performance using the Amazon Airborne Object Tracking dataset. In addition, we introduce the Fitness score as a new metric that jointly assesses both object detection and depth estimation performance. Our results show that the proposed methods outperform state-of-the-art approaches w.r.t. existing, as well as the proposed metrics.
On The Reliability Of Machine Learning Applications In Manufacturing Environments
Dec 19, 2021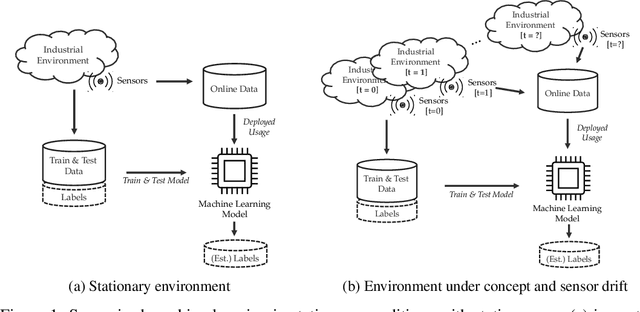
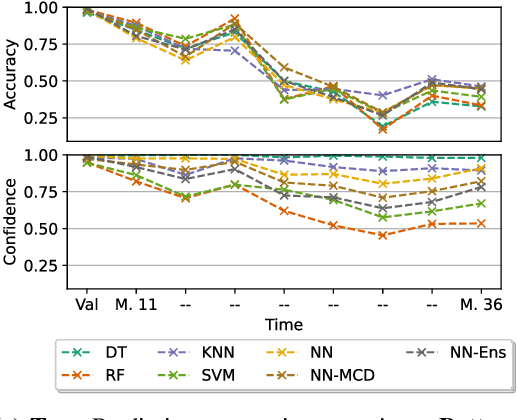
The increasing deployment of advanced digital technologies such as Internet of Things (IoT) devices and Cyber-Physical Systems (CPS) in industrial environments is enabling the productive use of machine learning (ML) algorithms in the manufacturing domain. As ML applications transcend from research to productive use in real-world industrial environments, the question of reliability arises. Since the majority of ML models are trained and evaluated on static datasets, continuous online monitoring of their performance is required to build reliable systems. Furthermore, concept and sensor drift can lead to degrading accuracy of the algorithm over time, thus compromising safety, acceptance and economics if undetected and not properly addressed. In this work, we exemplarily highlight the severity of the issue on a publicly available industrial dataset which was recorded over the course of 36 months and explain possible sources of drift. We assess the robustness of ML algorithms commonly used in manufacturing and show, that the accuracy strongly declines with increasing drift for all tested algorithms. We further investigate how uncertainty estimation may be leveraged for online performance estimation as well as drift detection as a first step towards continually learning applications. The results indicate, that ensemble algorithms like random forests show the least decay of confidence calibration under drift.
Single-Shot 3D Detection of Vehicles from Monocular RGB Images via Geometry Constrained Keypoints in Real-Time
Jun 23, 2020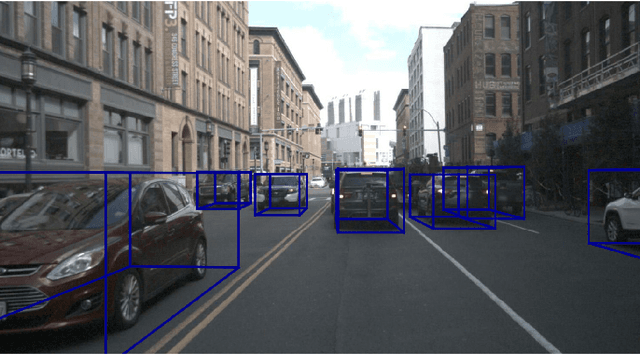
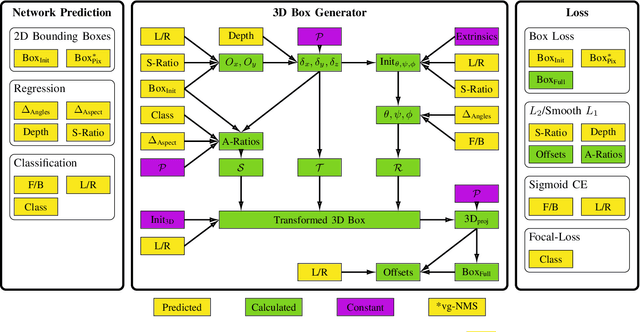

In this paper we propose a novel 3D single-shot object detection method for detecting vehicles in monocular RGB images. Our approach lifts 2D detections to 3D space by predicting additional regression and classification parameters and hence keeping the runtime close to pure 2D object detection. The additional parameters are transformed to 3D bounding box keypoints within the network under geometric constraints. Our proposed method features a full 3D description including all three angles of rotation without supervision by any labeled ground truth data for the object's orientation, as it focuses on certain keypoints within the image plane. While our approach can be combined with any modern object detection framework with only little computational overhead, we exemplify the extension of SSD for the prediction of 3D bounding boxes. We test our approach on different datasets for autonomous driving and evaluate it using the challenging KITTI 3D Object Detection as well as the novel nuScenes Object Detection benchmarks. While we achieve competitive results on both benchmarks we outperform current state-of-the-art methods in terms of speed with more than 20 FPS for all tested datasets and image resolutions.
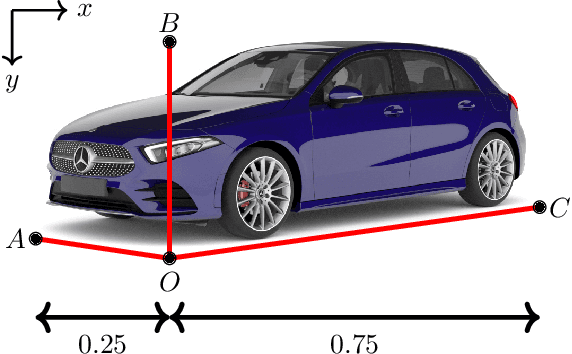
Cityscapes 3D: Dataset and Benchmark for 9 DoF Vehicle Detection
Jun 14, 2020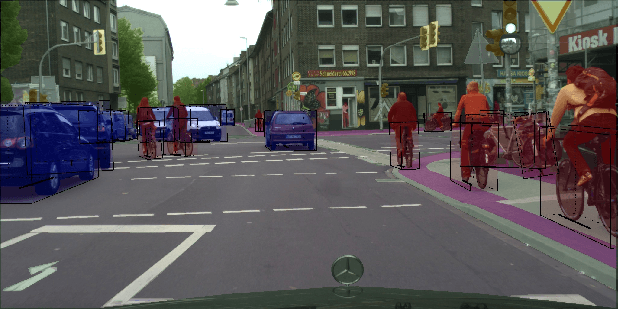
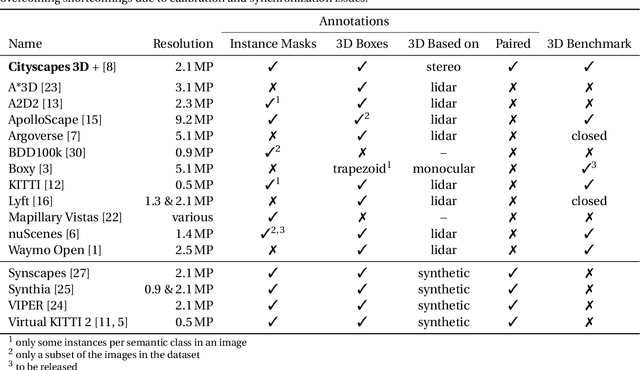
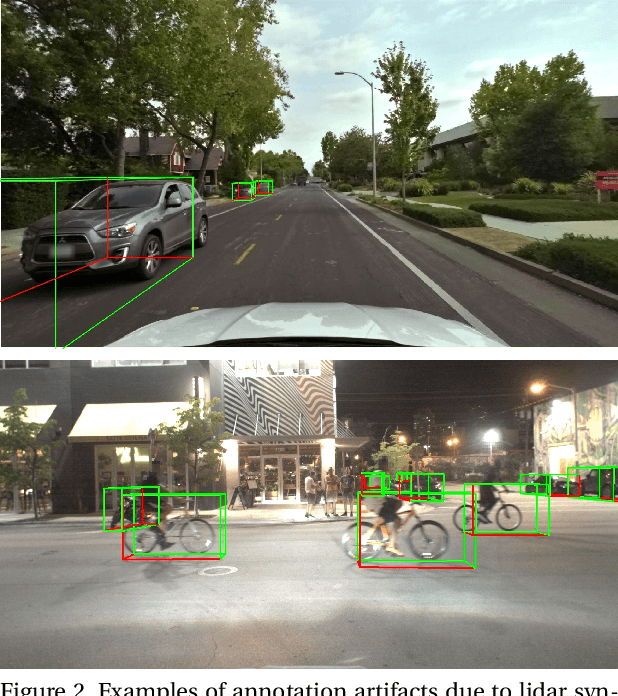
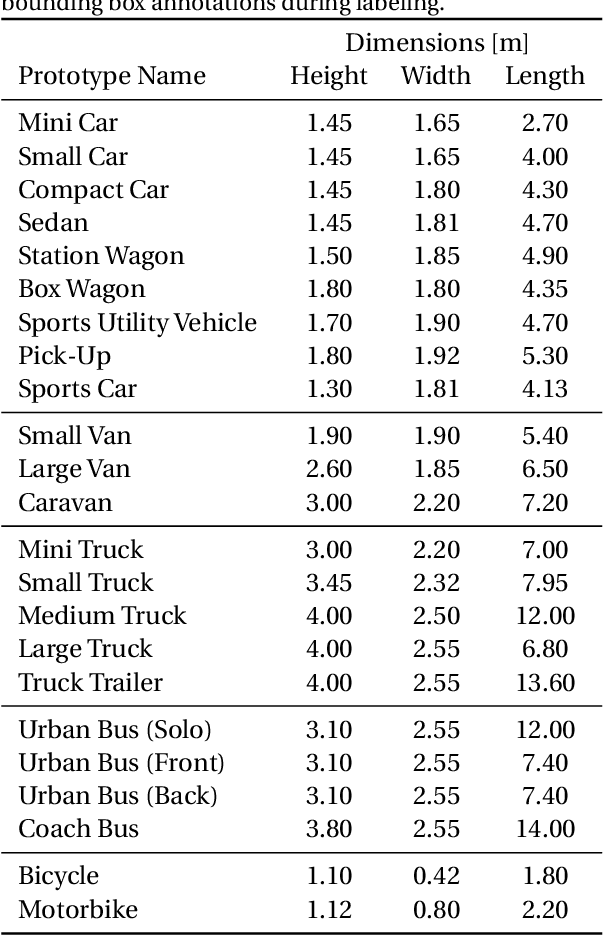
Detecting vehicles and representing their position and orientation in the three dimensional space is a key technology for autonomous driving. Recently, methods for 3D vehicle detection solely based on monocular RGB images gained popularity. In order to facilitate this task as well as to compare and drive state-of-the-art methods, several new datasets and benchmarks have been published. Ground truth annotations of vehicles are usually obtained using lidar point clouds, which often induces errors due to imperfect calibration or synchronization between both sensors. To this end, we propose Cityscapes 3D, extending the original Cityscapes dataset with 3D bounding box annotations for all types of vehicles. In contrast to existing datasets, our 3D annotations were labeled using stereo RGB images only and capture all nine degrees of freedom. This leads to a pixel-accurate reprojection in the RGB image and a higher range of annotations compared to lidar-based approaches. In order to ease multitask learning, we provide a pairing of 2D instance segments with 3D bounding boxes. In addition, we complement the Cityscapes benchmark suite with 3D vehicle detection based on the new annotations as well as metrics presented in this work. Dataset and benchmark are available online.