 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple Object Detection and Tracking in Panoramic Videos for Cycling Safety Analysis
Jul 21, 2024Panoramic cycling videos can record 360{\deg} views around the cyclists. Thus, it is essential to conduct automatic road user analysis on them using computer vision models to provide data for studies on cycling safety. However, the features of panoramic data such as severe distortions, large number of small objects and boundary continuity have brought great challenges to the existing CV models, including poor performance and evaluation methods that are no longer applicable. In addition, due to the lack of data with annotations, it is not easy to re-train the models. In response to these problems, the project proposed and implemented a three-step methodology: (1) improve the prediction performance of the pre-trained object detection models on panoramic data by projecting the original image into 4 perspective sub-images; (2) introduce supports for boundary continuity and category information into DeepSORT, a commonly used multiple object tracking model, and set an improved detection model as its detector; (3) using the tracking results, develop an application for detecting the overtaking behaviour of the surrounding vehicles. Evaluated on the panoramic cycling dataset built by the project, the proposed methodology improves the average precision of YOLO v5m6 and Faster RCNN-FPN under any input resolution setting. In addition, it raises MOTA and IDF1 of DeepSORT by 7.6\% and 9.7\% respectively. When detecting the overtakes in the test videos, it achieves the F-score of 0.88. The code is available on GitHub at github.com/cuppp1998/360_object_tracking to ensure the reproducibility and further improvements of results.
Re-designing cities with conditional adversarial networks
Apr 14, 2021

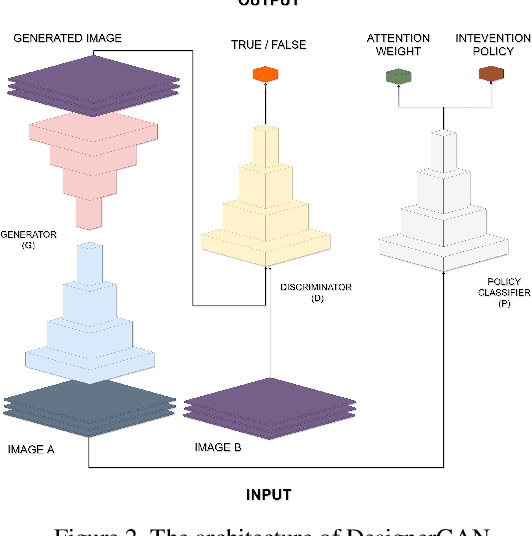

This paper introduces a conditional generative adversarial network to redesign a street-level image of urban scenes by generating 1) an urban intervention policy, 2) an attention map that localises where intervention is needed, 3) a high-resolution street-level image (1024 X 1024 or 1536 X1536) after implementing the intervention. We also introduce a new dataset that comprises aligned street-level images of before and after urban interventions from real-life scenarios that make this research possible. The introduced method has been trained on different ranges of urban interventions applied to realistic images. The trained model shows strong performance in re-modelling cities, outperforming existing methods that apply image-to-image translation in other domains that is computed in a single GPU. This research opens the door for machine intelligence to play a role in re-thinking and re-designing the different attributes of cities based on adversarial learning, going beyond the mainstream of facial landmarks manipulation or image synthesis from semantic segmentation.
CyclingNet: Detecting cycling near misses from video streams in complex urban scenes with deep learning
Jan 31, 2021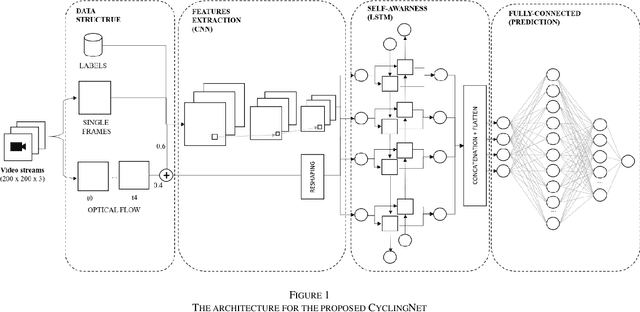


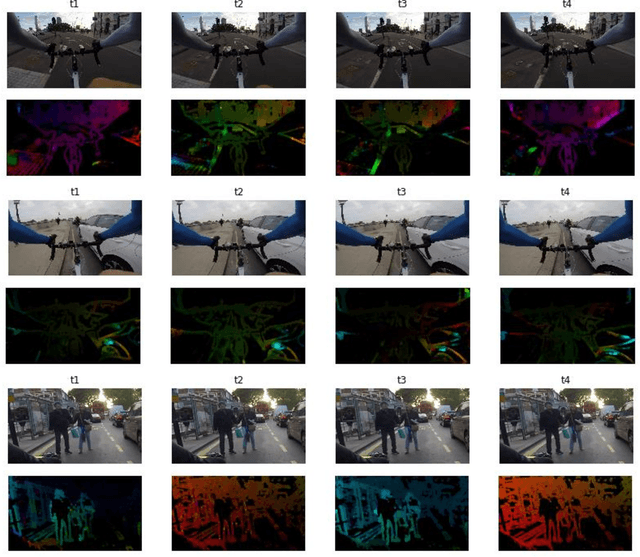
Cycling is a promising sustainable mode for commuting and leisure in cities, however, the fear of getting hit or fall reduces its wide expansion as a commuting mode. In this paper, we introduce a novel method called CyclingNet for detecting cycling near misses from video streams generated by a mounted frontal camera on a bike regardless of the camera position, the conditions of the built, the visual conditions and without any restrictions on the riding behaviour. CyclingNet is a deep computer vision model based on convolutional structure embedded with self-attention bidirectional long-short term memory (LSTM) blocks that aim to understand near misses from both sequential images of scenes and their optical flows. The model is trained on scenes of both safe rides and near misses. After 42 hours of training on a single GPU, the model shows high accuracy on the training, testing and validation sets. The model is intended to be used for generating information that can draw significant conclusions regarding cycling behaviour in cities and elsewhere, which could help planners and policy-makers to better understand the requirement of safety measures when designing infrastructure or drawing policies. As for future work, the model can be pipelined with other state-of-the-art classifiers and object detectors simultaneously to understand the causality of near misses based on factors related to interactions of road-users, the built and the natural environments.