 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLIP the Landscape: Automated Tagging of Crowdsourced Landscape Images
Jun 13, 2025We present a CLIP-based, multi-modal, multi-label classifier for predicting geographical context tags from landscape photos in the Geograph dataset--a crowdsourced image archive spanning the British Isles, including remote regions lacking POIs and street-level imagery. Our approach addresses a Kaggle competition\footnote{https://www.kaggle.com/competitions/predict-geographic-context-from-landscape-photos} task based on a subset of Geograph's 8M images, with strict evaluation: exact match accuracy is required across 49 possible tags. We show that combining location and title embeddings with image features improves accuracy over using image embeddings alone. We release a lightweight pipeline\footnote{https://github.com/SpaceTimeLab/ClipTheLandscape} that trains on a modest laptop, using pre-trained CLIP image and text embeddings and a simple classification head. Predicted tags can support downstream tasks such as building location embedders for GeoAI applications, enriching spatial understanding in data-sparse regions.
V-RoAst: A New Dataset for Visual Road Assessment
Aug 21, 2024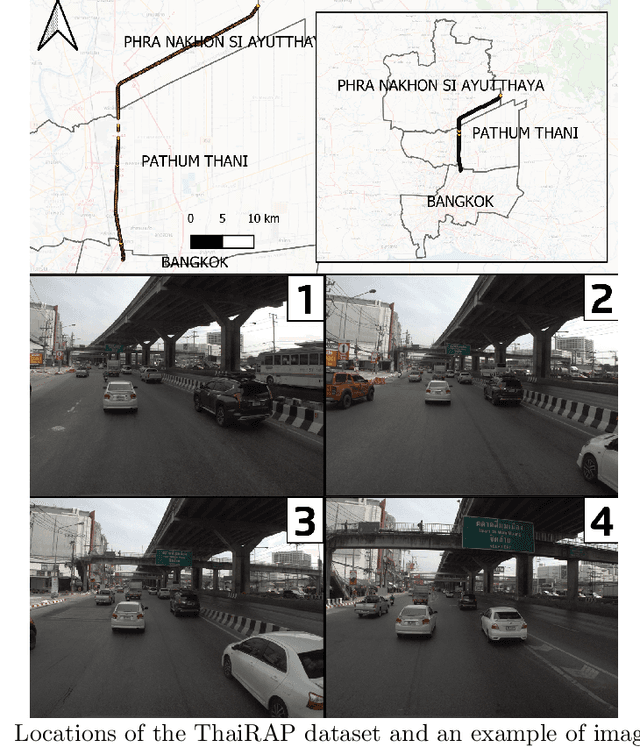
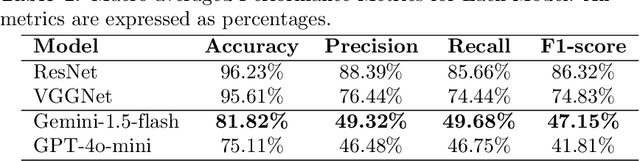
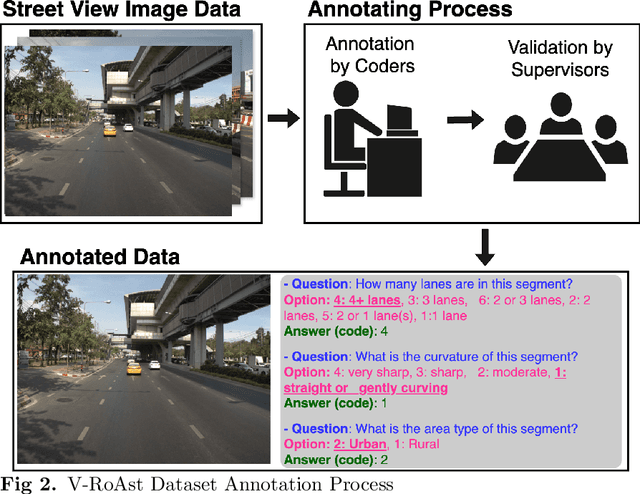
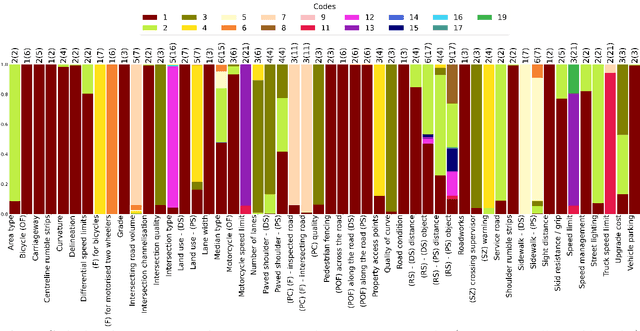
Road traffic crashes cause millions of deaths annually and have a significant economic impact, particularly in low- and middle-income countries (LMICs). This paper presents an approach using Vision Language Models (VLMs) for road safety assessment, overcoming the limitations of traditional Convolutional Neural Networks (CNNs). We introduce a new task ,V-RoAst (Visual question answering for Road Assessment), with a real-world dataset. Our approach optimizes prompt engineering and evaluates advanced VLMs, including Gemini-1.5-flash and GPT-4o-mini. The models effectively examine attributes for road assessment. Using crowdsourced imagery from Mapillary, our scalable solution influentially estimates road safety levels. In addition, this approach is designed for local stakeholders who lack resources, as it does not require training data. It offers a cost-effective and automated methods for global road safety assessments, potentially saving lives and reducing economic burdens.
Multiple Object Detection and Tracking in Panoramic Videos for Cycling Safety Analysis
Jul 21, 2024Panoramic cycling videos can record 360{\deg} views around the cyclists. Thus, it is essential to conduct automatic road user analysis on them using computer vision models to provide data for studies on cycling safety. However, the features of panoramic data such as severe distortions, large number of small objects and boundary continuity have brought great challenges to the existing CV models, including poor performance and evaluation methods that are no longer applicable. In addition, due to the lack of data with annotations, it is not easy to re-train the models. In response to these problems, the project proposed and implemented a three-step methodology: (1) improve the prediction performance of the pre-trained object detection models on panoramic data by projecting the original image into 4 perspective sub-images; (2) introduce supports for boundary continuity and category information into DeepSORT, a commonly used multiple object tracking model, and set an improved detection model as its detector; (3) using the tracking results, develop an application for detecting the overtaking behaviour of the surrounding vehicles. Evaluated on the panoramic cycling dataset built by the project, the proposed methodology improves the average precision of YOLO v5m6 and Faster RCNN-FPN under any input resolution setting. In addition, it raises MOTA and IDF1 of DeepSORT by 7.6\% and 9.7\% respectively. When detecting the overtakes in the test videos, it achieves the F-score of 0.88. The code is available on GitHub at github.com/cuppp1998/360_object_tracking to ensure the reproducibility and further improvements of results.