 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Use of Torque Measurement in Centroidal State Estimation
Feb 25, 2022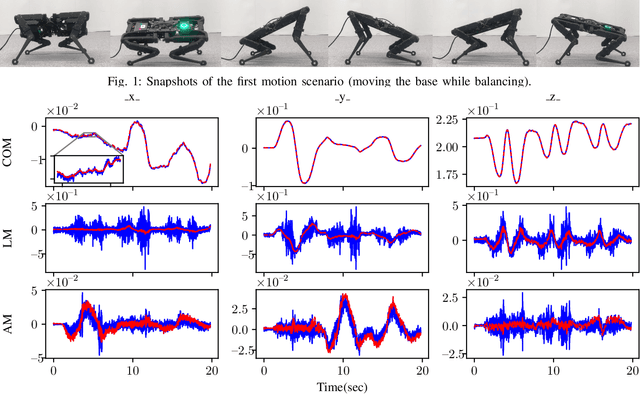
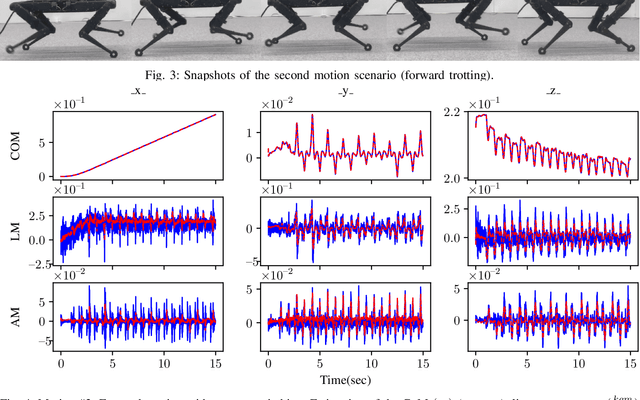
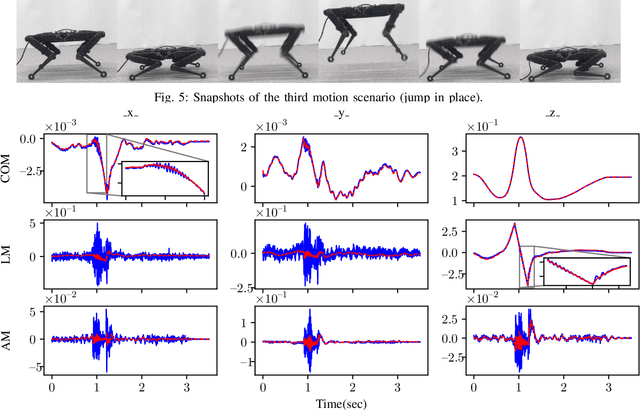
State of the art legged robots are either capable of measuring torque at the output of their drive systems, or have transparent drive systems which enable the computation of joint torques from motor currents. In either case, this sensor modality is seldom used in state estimation. In this paper, we propose to use joint torque measurements to estimate the centroidal states of legged robots. To do so, we project the whole-body dynamics of a legged robot into the nullspace of the contact constraints, allowing expression of the dynamics independent of the contact forces. Using the constrained dynamics and the centroidal momentum matrix, we are able to directly relate joint torques and centroidal states dynamics. Using the resulting model as the process model of an Extended Kalman Filter (EKF), we fuse the torque measurement in the centroidal state estimation problem. Through real-world experiments on a quadruped robot with different gaits, we demonstrate that the estimated centroidal states from our torque-based EKF drastically improve the estimation of these quantities compared to direct computation.
An MPC Walking Framework With External Contact Forces
Feb 27, 2018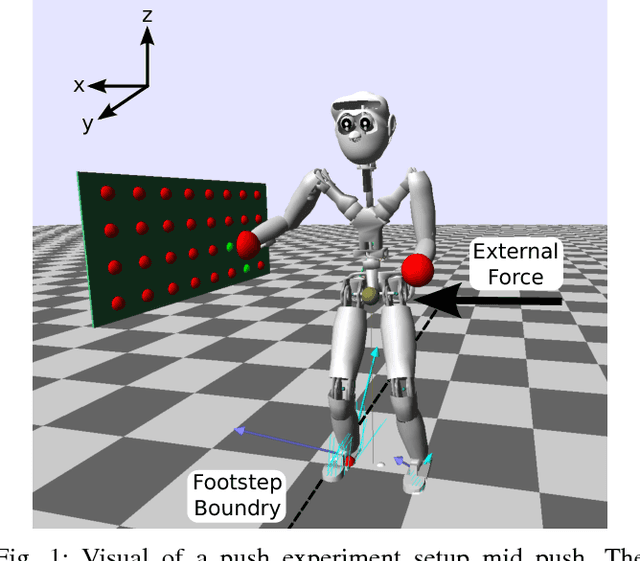
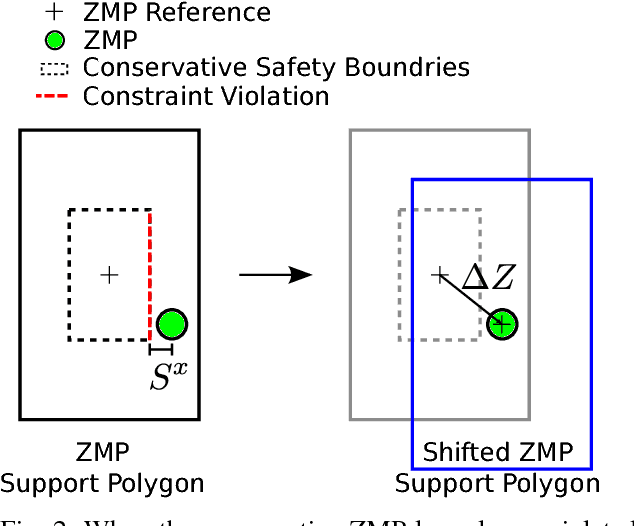
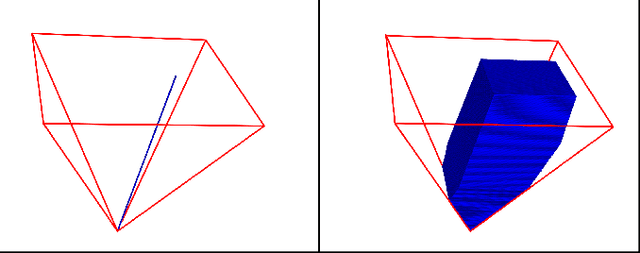
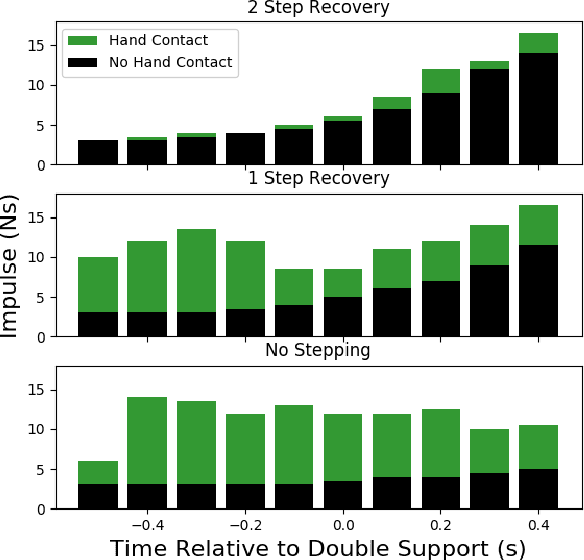
In this work, we present an extension to a linear Model Predictive Control (MPC) scheme that plans external contact forces for the robot when given multiple contact locations and their corresponding friction cone. To this end, we set up a two-step optimization problem. In the first optimization, we compute the Center of Mass (CoM) trajectory, foot step locations, and introduce slack variables to account for violating the imposed constraints on the Zero Moment Point (ZMP). We then use the slack variables to trigger the second optimization, in which we calculate the optimal external force that compensates for the ZMP tracking error. This optimization considers multiple contacts positions within the environment by formulating the problem as a Mixed Integer Quadratic Program (MIQP) that can be solved at a speed between 100-300 Hz. Once contact is created, the MIQP reduces to a single Quadratic Program (QP) that can be solved in real-time ($<$ 1kHz). Simulations show that the presented walking control scheme can withstand disturbances 2-3x larger with the additional force provided by a hand contact.
Unsupervised Contact Learning for Humanoid Estimation and Control
Sep 21, 2017
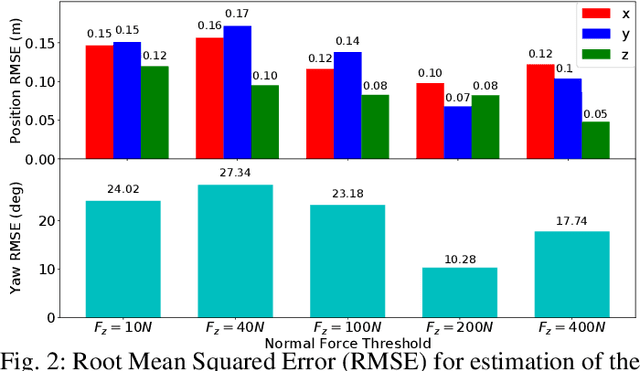


This work presents a method for contact state estimation using fuzzy clustering to learn contact probability for full, six-dimensional humanoid contacts. The data required for training is solely from proprioceptive sensors - endeffector contact wrench sensors and inertial measurement units (IMUs) - and the method is completely unsupervised. The resulting cluster means are used to efficiently compute the probability of contact in each of the six endeffector degrees of freedom (DoFs) independently. This clustering-based contact probability estimator is validated in a kinematics-based base state estimator in a simulation environment with realistic added sensor noise for locomotion over rough, low-friction terrain on which the robot is subject to foot slip and rotation. The proposed base state estimator which utilizes these six DoF contact probability estimates is shown to perform considerably better than that which determines kinematic contact constraints purely based on measured normal force.
Balancing and Walking Using Full Dynamics LQR Control With Contact Constraints
Jan 27, 2017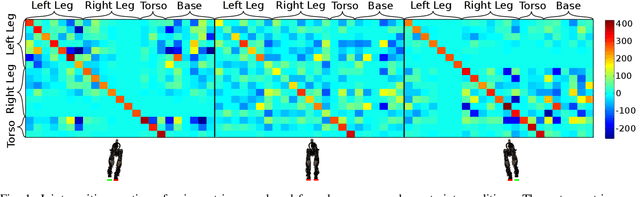
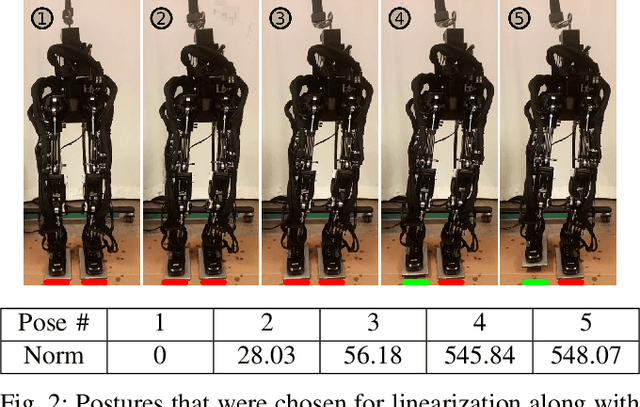
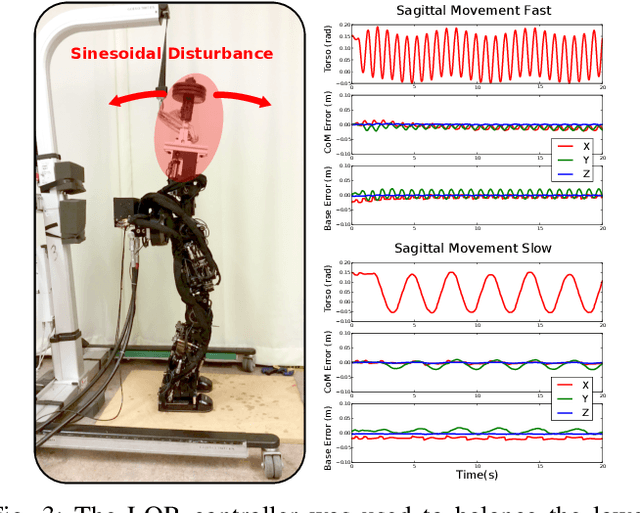
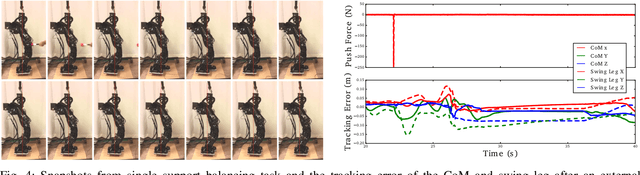
Torque control algorithms which consider robot dynamics and contact constraints are important for creating dynamic behaviors for humanoids. As computational power increases, algorithms tend to also increase in complexity. However, it is not clear how much complexity is really required to create controllers which exhibit good performance. In this paper, we study the capabilities of a simple approach based on contact consistent LQR controllers designed around key poses to control various tasks on a humanoid robot. We present extensive experimental results on a hydraulic, torque controlled humanoid performing balancing and stepping tasks. This feedback control approach captures the necessary synergies between the DoFs of the robot to guarantee good control performance. We show that for the considered tasks, it is only necessary to re-linearize the dynamics of the robot at different contact configurations and that increasing the number of LQR controllers along desired trajectories does not improve performance. Our result suggest that very simple controllers can yield good performance competitive with current state of the art, but more complex, optimization-based whole-body controllers. A video of the experiments can be found at https://youtu.be/5T08CNKV1hw.
Inertial Sensor-Based Humanoid Joint State Estimation
Feb 16, 2016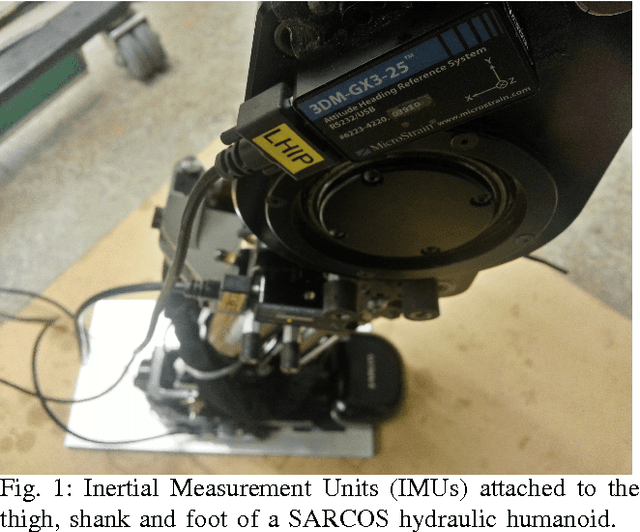
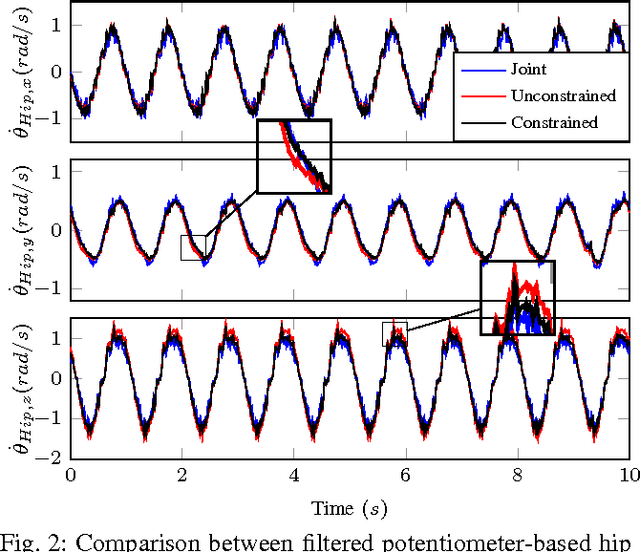
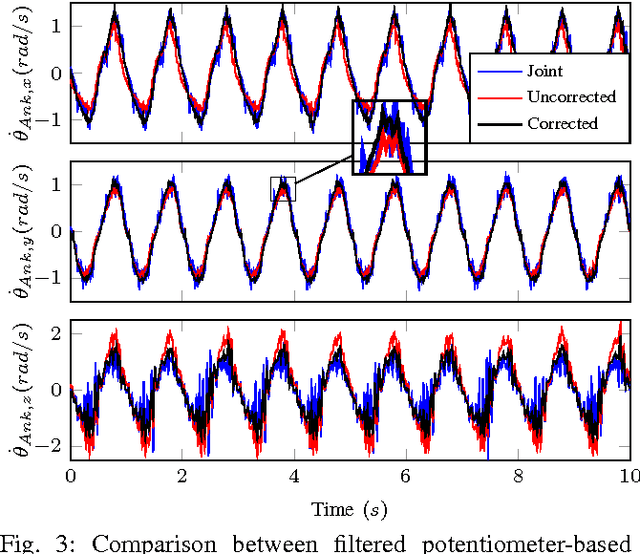
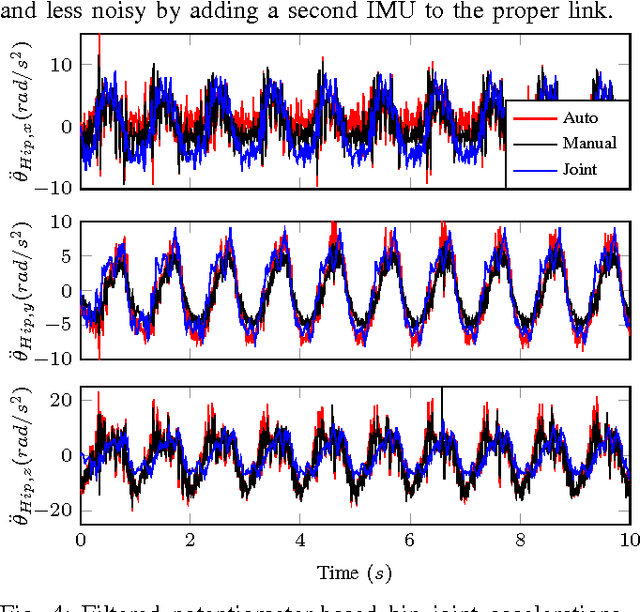
This work presents methods for the determination of a humanoid robot's joint velocities and accelerations directly from link-mounted Inertial Measurement Units (IMUs) each containing a three-axis gyroscope and a three-axis accelerometer. No information about the global pose of the floating base or its links is required and precise knowledge of the link IMU poses is not necessary due to presented calibration routines. Additionally, a filter is introduced to fuse gyroscope angular velocities with joint position measurements and compensate the computed joint velocities for time-varying gyroscope biases. The resulting joint velocities are subject to less noise and delay than filtered velocities computed from numerical differentiation of joint potentiometer signals, leading to superior performance in joint feedback control as demonstrated in experiments performed on a SARCOS hydraulic humanoid.
Momentum Control with Hierarchical Inverse Dynamics on a Torque-Controlled Humanoid
Aug 07, 2015
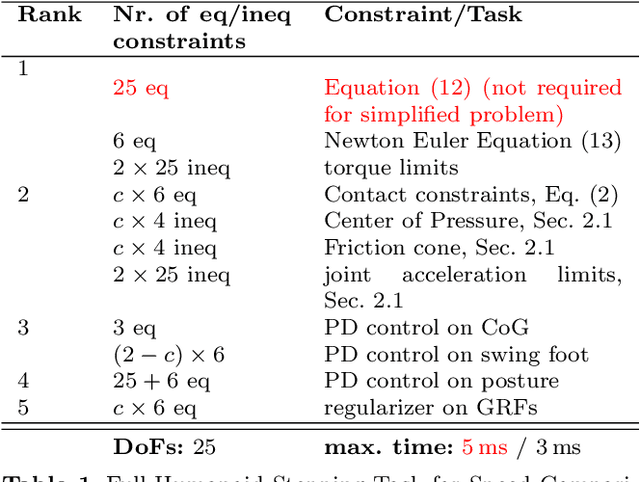
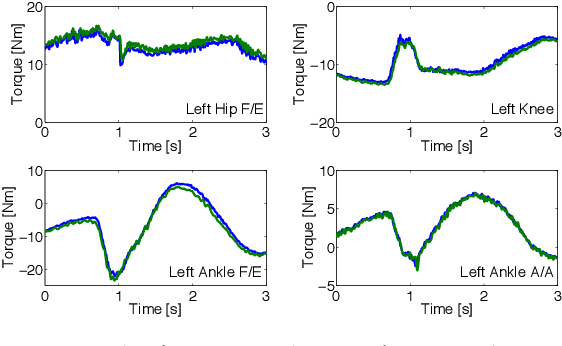
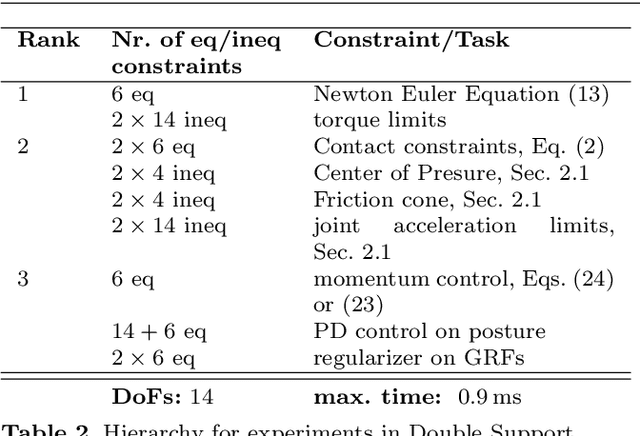
Hierarchical inverse dynamics based on cascades of quadratic programs have been proposed for the control of legged robots. They have important benefits but to the best of our knowledge have never been implemented on a torque controlled humanoid where model inaccuracies, sensor noise and real-time computation requirements can be problematic. Using a reformulation of existing algorithms, we propose a simplification of the problem that allows to achieve real-time control. Momentum-based control is integrated in the task hierarchy and a LQR design approach is used to compute the desired associated closed-loop behavior and improve performance. Extensive experiments on various balancing and tracking tasks show very robust performance in the face of unknown disturbances, even when the humanoid is standing on one foot. Our results demonstrate that hierarchical inverse dynamics together with momentum control can be efficiently used for feedback control under real robot conditions.
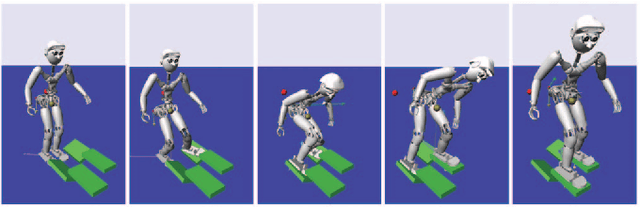
Humanoid Momentum Estimation Using Sensed Contact Wrenches
Jul 15, 2015
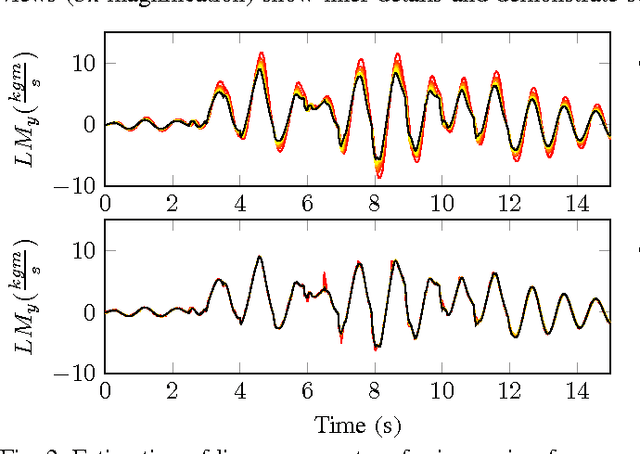
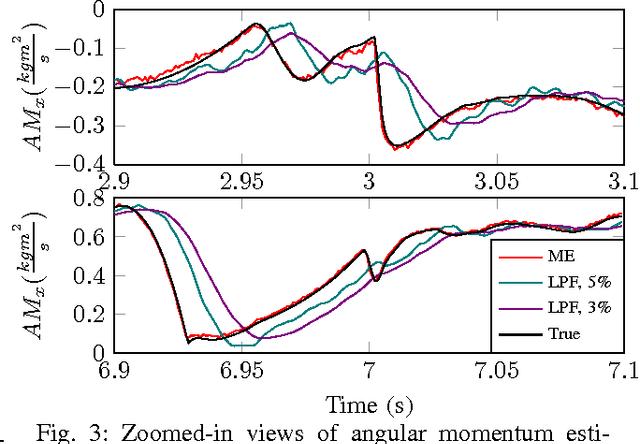
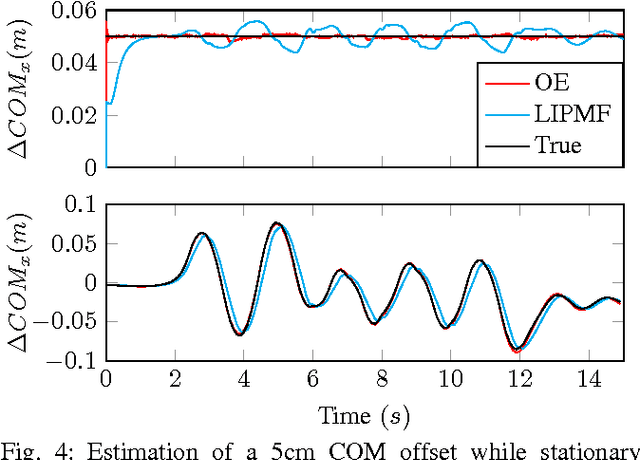
This work presents approaches for the estimation of quantities important for the control of the momentum of a humanoid robot. In contrast to previous approaches which use simplified models such as the Linear Inverted Pendulum Model, we present estimators based on the momentum dynamics of the robot. By using this simple yet dynamically-consistent model, we avoid the issues of using simplified models for estimation. We develop an estimator for the center of mass and full momentum which can be reformulated to estimate center of mass offsets as well as external wrenches applied to the robot. The observability of these estimators is investigated and their performance is evaluated in comparison to previous approaches.
Trajectory generation for multi-contact momentum-control
Jul 15, 2015
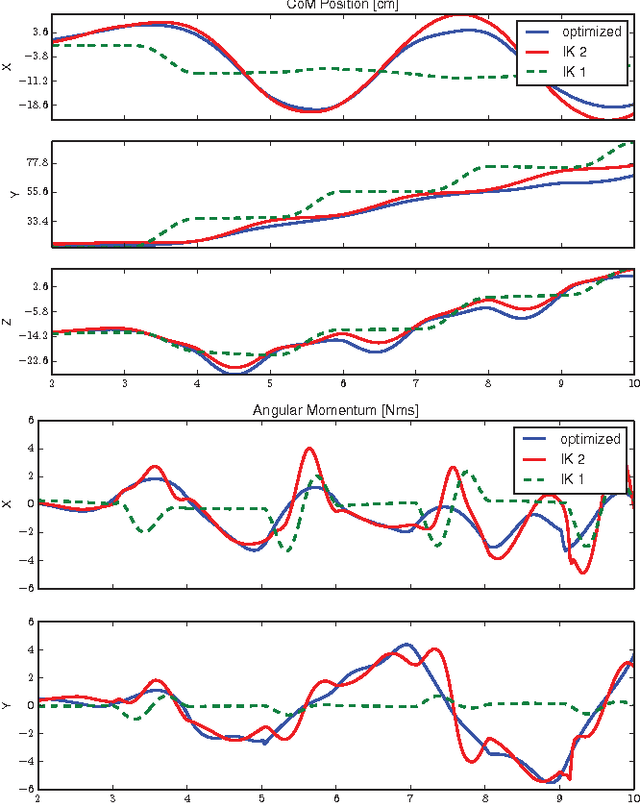

Simplified models of the dynamics such as the linear inverted pendulum model (LIPM) have proven to perform well for biped walking on flat ground. However, for more complex tasks the assumptions of these models can become limiting. For example, the LIPM does not allow for the control of contact forces independently, is limited to co-planar contacts and assumes that the angular momentum is zero. In this paper, we propose to use the full momentum equations of a humanoid robot in a trajectory optimization framework to plan its center of mass, linear and angular momentum trajectories. The model also allows for planning desired contact forces for each end-effector in arbitrary contact locations. We extend our previous results on LQR design for momentum control by computing the (linearized) optimal momentum feedback law in a receding horizon fashion. The resulting desired momentum and the associated feedback law are then used in a hierarchical whole body control approach. Simulation experiments show that the approach is computationally fast and is able to generate plans for locomotion on complex terrains while demonstrating good tracking performance for the full humanoid control.
State Estimation for a Humanoid Robot
Dec 10, 2014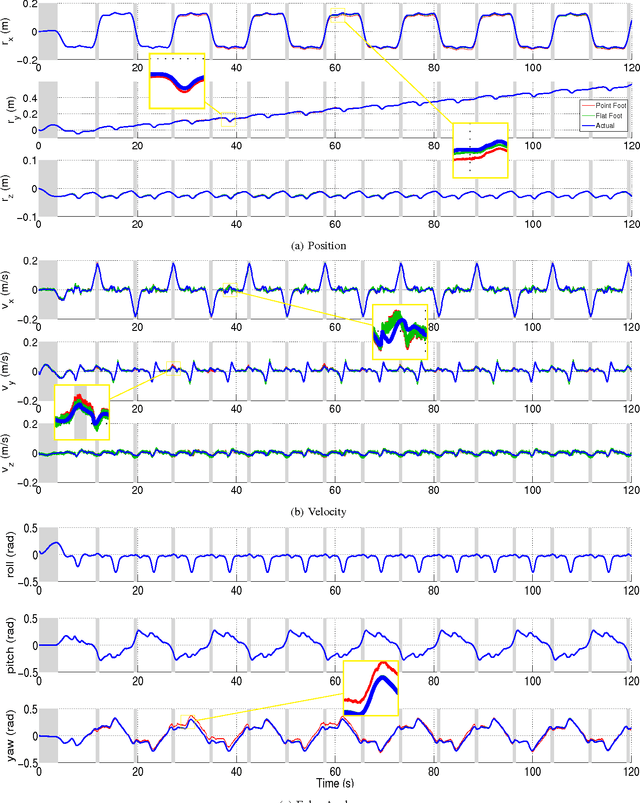


This paper introduces a framework for state estimation on a humanoid robot platform using only common proprioceptive sensors and knowledge of leg kinematics. The presented approach extends that detailed in [1] on a quadruped platform by incorporating the rotational constraints imposed by the humanoid's flat feet. As in previous work, the proposed Extended Kalman Filter (EKF) accommodates contact switching and makes no assumptions about gait or terrain, making it applicable on any humanoid platform for use in any task. The filter employs a sensor-based prediction model which uses inertial data from an IMU and corrects for integrated error using a kinematics-based measurement model which relies on joint encoders and a kinematic model to determine the relative position and orientation of the feet. A nonlinear observability analysis is performed on both the original and updated filters and it is concluded that the new filter significantly simplifies singular cases and improves the observability characteristics of the system. Results on simulated walking and squatting datasets demonstrate the performance gain of the flat-foot filter as well as confirm the results of the presented observability analysis.