 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Sensor-Based Humanoid Joint State Estimation
Paper and Code
Feb 16, 2016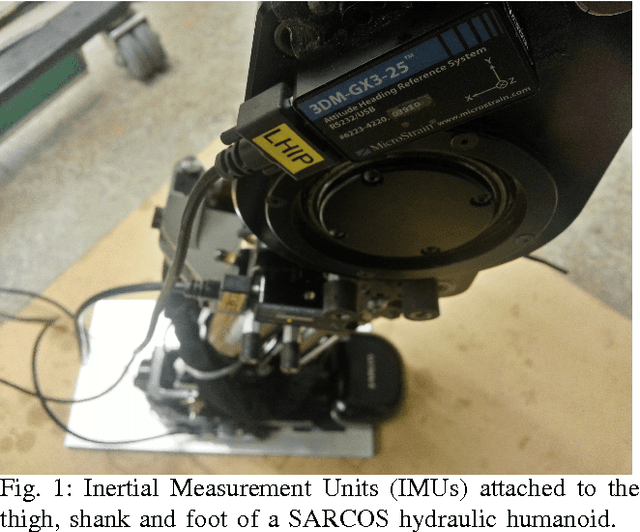
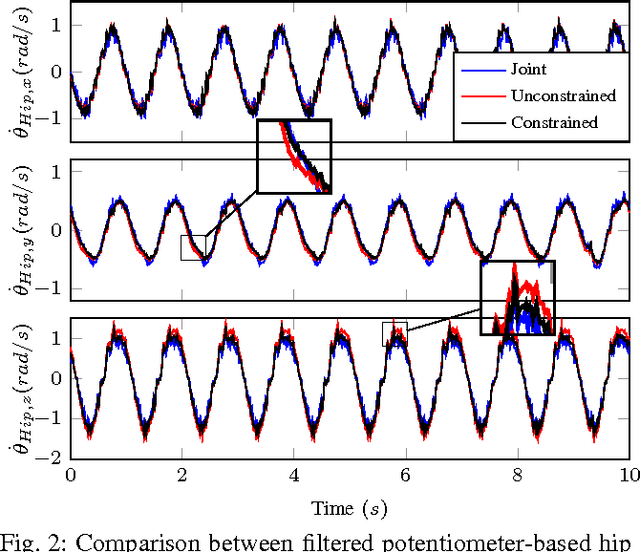
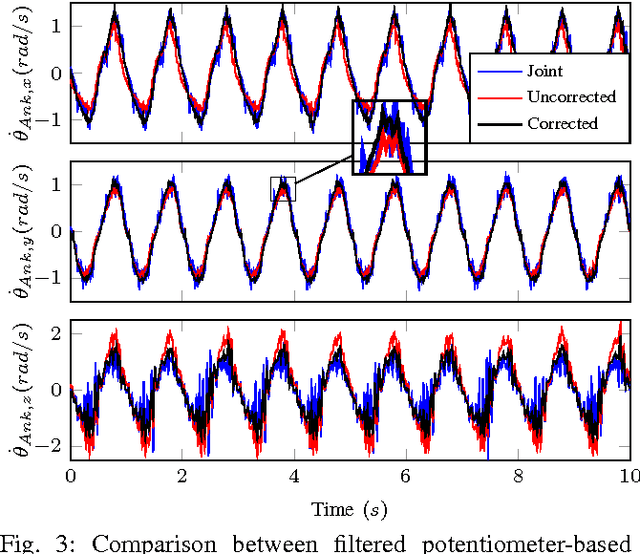
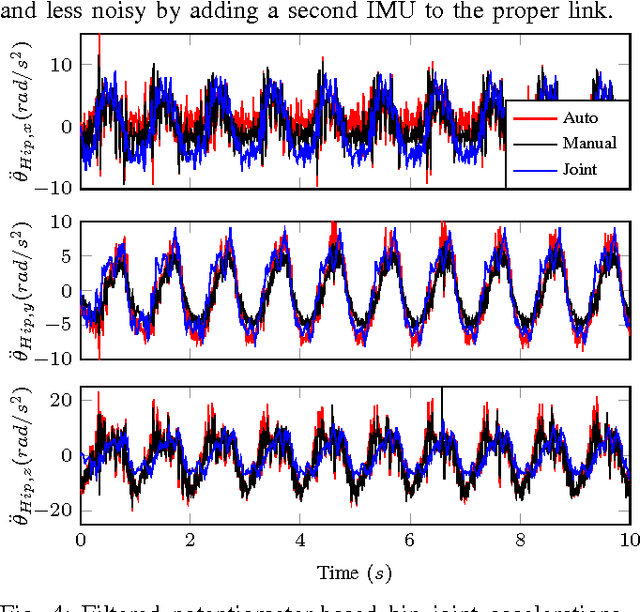
This work presents methods for the determination of a humanoid robot's joint velocities and accelerations directly from link-mounted Inertial Measurement Units (IMUs) each containing a three-axis gyroscope and a three-axis accelerometer. No information about the global pose of the floating base or its links is required and precise knowledge of the link IMU poses is not necessary due to presented calibration routines. Additionally, a filter is introduced to fuse gyroscope angular velocities with joint position measurements and compensate the computed joint velocities for time-varying gyroscope biases. The resulting joint velocities are subject to less noise and delay than filtered velocities computed from numerical differentiation of joint potentiometer signals, leading to superior performance in joint feedback control as demonstrated in experiments performed on a SARCOS hydraulic humanoid.