 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Contact Learning for Humanoid Estimation and Control
Paper and Code
Sep 21, 2017
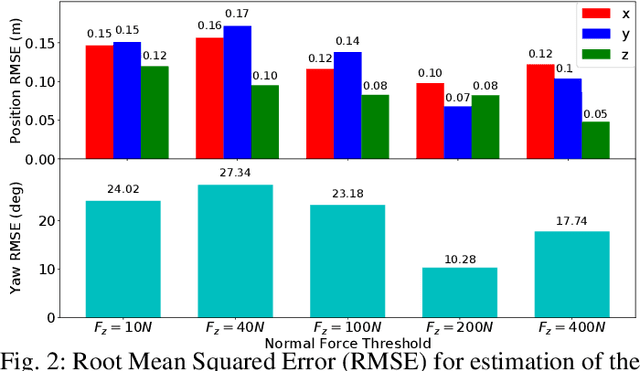


This work presents a method for contact state estimation using fuzzy clustering to learn contact probability for full, six-dimensional humanoid contacts. The data required for training is solely from proprioceptive sensors - endeffector contact wrench sensors and inertial measurement units (IMUs) - and the method is completely unsupervised. The resulting cluster means are used to efficiently compute the probability of contact in each of the six endeffector degrees of freedom (DoFs) independently. This clustering-based contact probability estimator is validated in a kinematics-based base state estimator in a simulation environment with realistic added sensor noise for locomotion over rough, low-friction terrain on which the robot is subject to foot slip and rotation. The proposed base state estimator which utilizes these six DoF contact probability estimates is shown to perform considerably better than that which determines kinematic contact constraints purely based on measured normal force.