Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Momentum Estimation Using Sensed Contact Wrenches
Paper and Code
Jul 15, 2015
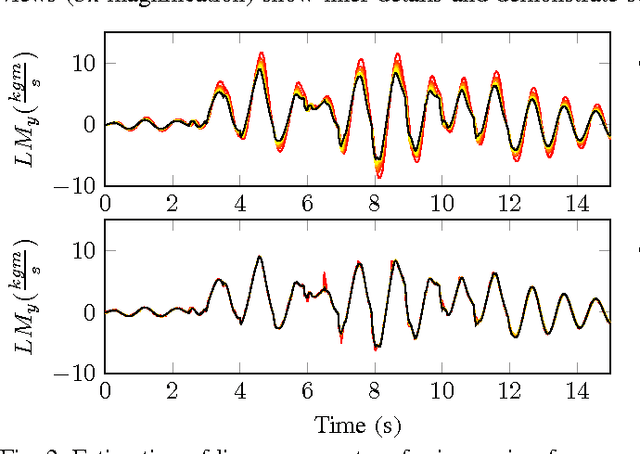
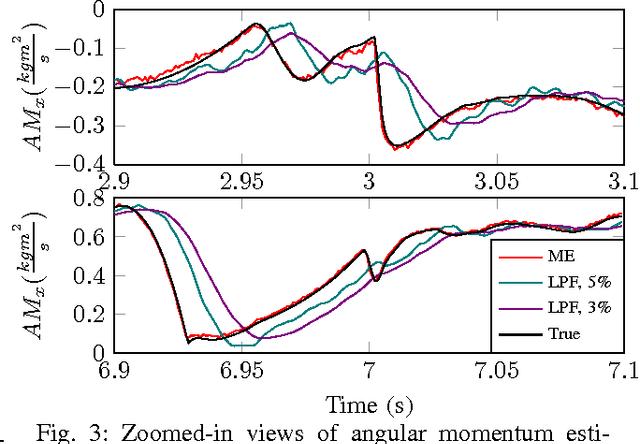
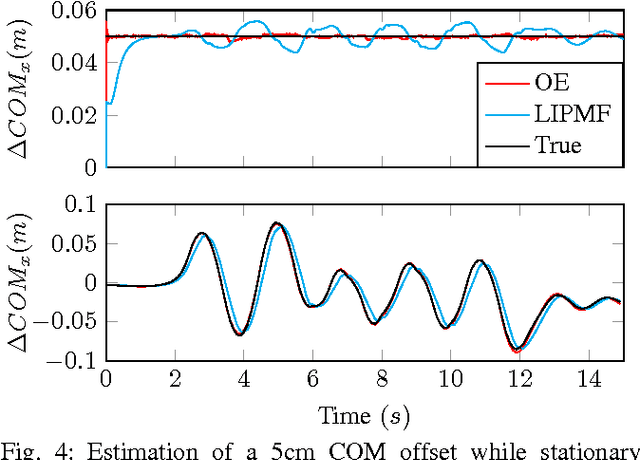
This work presents approaches for the estimation of quantities important for the control of the momentum of a humanoid robot. In contrast to previous approaches which use simplified models such as the Linear Inverted Pendulum Model, we present estimators based on the momentum dynamics of the robot. By using this simple yet dynamically-consistent model, we avoid the issues of using simplified models for estimation. We develop an estimator for the center of mass and full momentum which can be reformulated to estimate center of mass offsets as well as external wrenches applied to the robot. The observability of these estimators is investigated and their performance is evaluated in comparison to previous approaches.
* Submitted to the 15th IEEE RAS Humanoids Conference, to be held in
Seoul, Korea on November 3 - 5, 2015
View paper on