 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust prediction under missingness shifts
Jun 24, 2024Prediction becomes more challenging with missing covariates. What method is chosen to handle missingness can greatly affect how models perform. In many real-world problems, the best prediction performance is achieved by models that can leverage the informative nature of a value being missing. Yet, the reasons why a covariate goes missing can change once a model is deployed in practice. If such a missingness shift occurs, the conditional probability of a value being missing differs in the target data. Prediction performance in the source data may no longer be a good selection criterion, and approaches that do not rely on informative missingness may be preferable. However, we show that the Bayes predictor remains unchanged by ignorable shifts for which the probability of missingness only depends on observed data. Any consistent estimator of the Bayes predictor may therefore result in robust prediction under those conditions, although we show empirically that different methods appear robust to different types of shifts. If the missingness shift is non-ignorable, the Bayes predictor may change due to the shift. While neither approach recovers the Bayes predictor in this case, we found empirically that disregarding missingness was most beneficial when it was highly informative.
Evaluation of Active Feature Acquisition Methods for Time-varying Feature Settings
Dec 07, 2023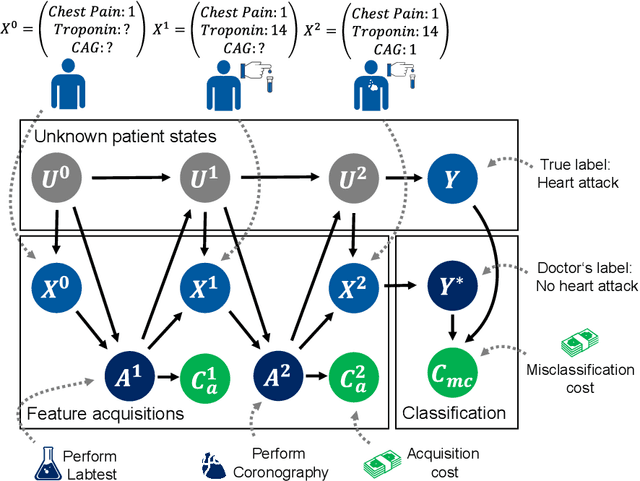
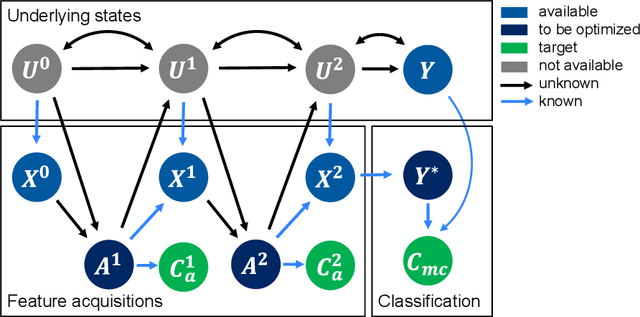
Machine learning methods often assume input features are available at no cost. However, in domains like healthcare, where acquiring features could be expensive or harmful, it is necessary to balance a feature's acquisition cost against its predictive value. The task of training an AI agent to decide which features to acquire is called active feature acquisition (AFA). By deploying an AFA agent, we effectively alter the acquisition strategy and trigger a distribution shift. To safely deploy AFA agents under this distribution shift, we present the problem of active feature acquisition performance evaluation (AFAPE). We examine AFAPE under i) a no direct effect (NDE) assumption, stating that acquisitions don't affect the underlying feature values; and ii) a no unobserved confounding (NUC) assumption, stating that retrospective feature acquisition decisions were only based on observed features. We show that one can apply offline reinforcement learning under the NUC assumption and missing data methods under the NDE assumption. When NUC and NDE hold, we propose a novel semi-offline reinforcement learning framework, which requires a weaker positivity assumption and yields more data-efficient estimators. We introduce three novel estimators: a direct method (DM), an inverse probability weighting (IPW), and a double reinforcement learning (DRL) estimator.
Evaluation of Active Feature Acquisition Methods for Static Feature Settings
Dec 07, 2023



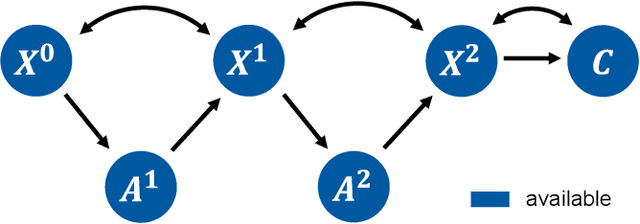
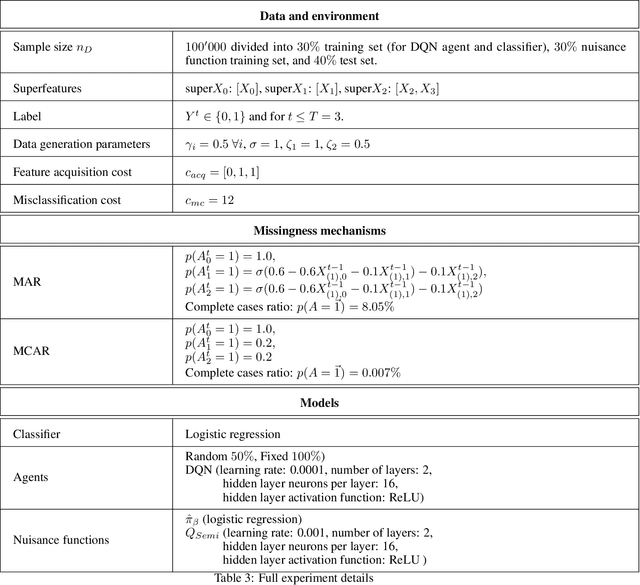
Active feature acquisition (AFA) agents, crucial in domains like healthcare where acquiring features is often costly or harmful, determine the optimal set of features for a subsequent classification task. As deploying an AFA agent introduces a shift in missingness distribution, it's vital to assess its expected performance at deployment using retrospective data. In a companion paper, we introduce a semi-offline reinforcement learning (RL) framework for active feature acquisition performance evaluation (AFAPE) where features are assumed to be time-dependent. Here, we study and extend the AFAPE problem to cover static feature settings, where features are time-invariant, and hence provide more flexibility to the AFA agents in deciding the order of the acquisitions. In this static feature setting, we derive and adapt new inverse probability weighting (IPW), direct method (DM), and double reinforcement learning (DRL) estimators within the semi-offline RL framework. These estimators can be applied when the missingness in the retrospective dataset follows a missing-at-random (MAR) pattern. They also can be applied to missing-not-at-random (MNAR) patterns in conjunction with appropriate existing missing data techniques. We illustrate the improved data efficiency offered by the semi-offline RL estimators in synthetic and real-world data experiments under synthetic MAR and MNAR missingness.
Path Dependent Structural Equation Models
Aug 24, 2020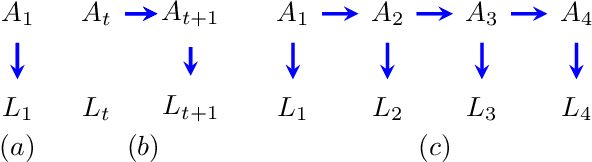
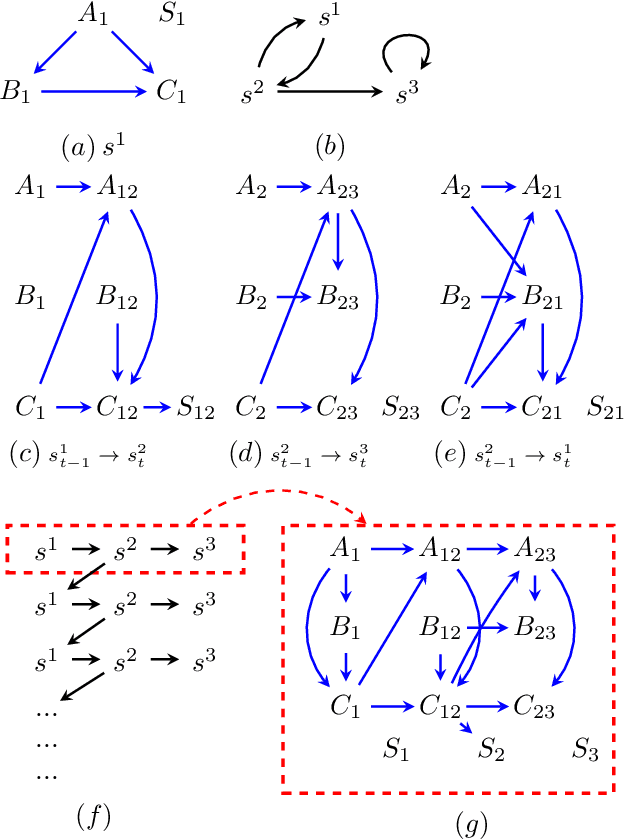
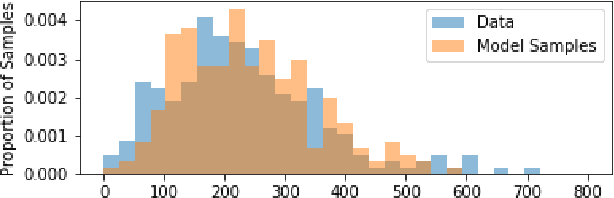
Causal analyses of longitudinal data generally assume structure that is invariant over time. Graphical causal models describe these data using a single causal diagram repeated at every time step. In structured systems that transition between qualitatively different states in discrete time steps, such an approach is deficient on two fronts. First, time-varying variables may have state-specific causal relationships that need to be captured. Second, an intervention can result in state transitions downstream of the intervention different from thoseactually observed in the data. In other words, interventions may counterfactually alter the subsequent temporal evolution of the system. We introduce a generalization of causal graphical models, Path Dependent Structural Equation Models (PDSEMs), that can describe such systems. We show how causal inference may be performed in such models and illustrate its use in simulations and data obtained from a septoplasty surgical procedure.
Recognizing Surgical Activities with Recurrent Neural Networks
Jun 22, 2016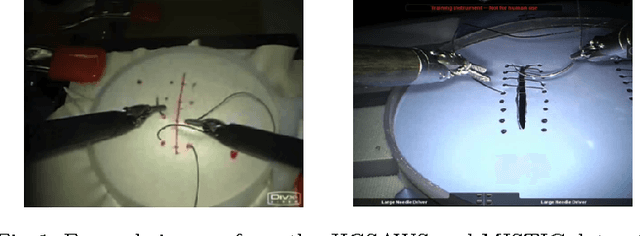
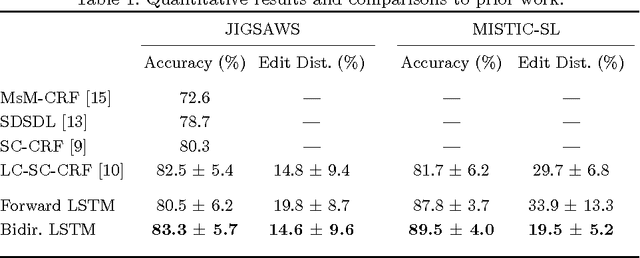
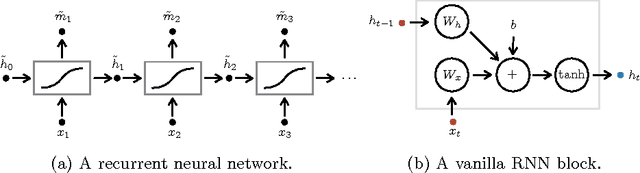
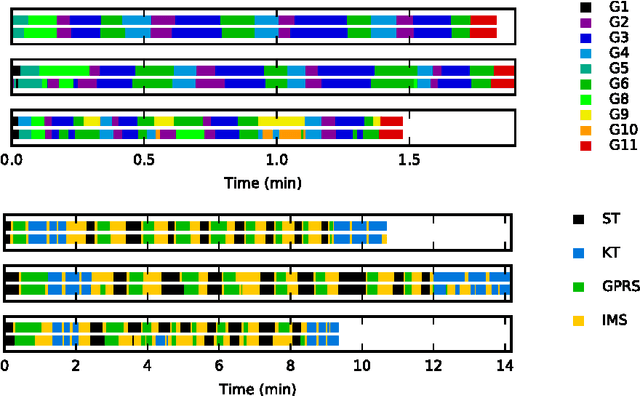
We apply recurrent neural networks to the task of recognizing surgical activities from robot kinematics. Prior work in this area focuses on recognizing short, low-level activities, or gestures, and has been based on variants of hidden Markov models and conditional random fields. In contrast, we work on recognizing both gestures and longer, higher-level activites, or maneuvers, and we model the mapping from kinematics to gestures/maneuvers with recurrent neural networks. To our knowledge, we are the first to apply recurrent neural networks to this task. Using a single model and a single set of hyperparameters, we match state-of-the-art performance for gesture recognition and advance state-of-the-art performance for maneuver recognition, in terms of both accuracy and edit distance. Code is available at https://github.com/rdipietro/miccai-2016-surgical-activity-rec .
Automated Objective Surgical Skill Assessment in the Operating Room Using Unstructured Tool Motion
Dec 18, 2014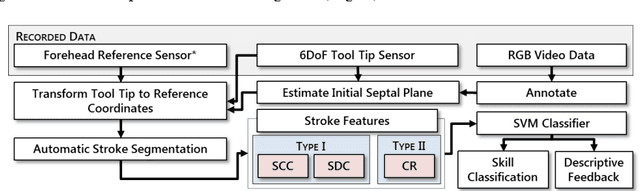
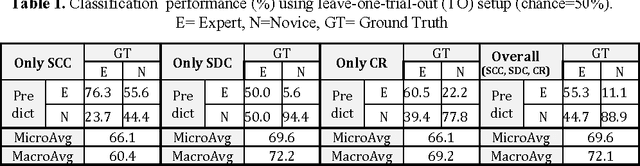
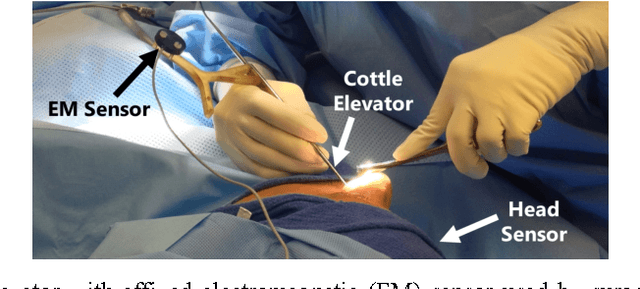
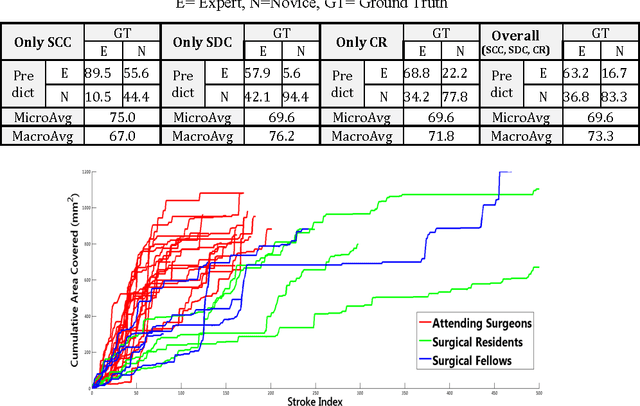
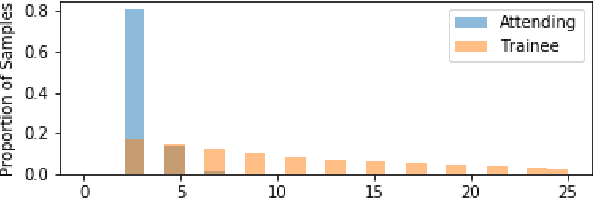
Previous work on surgical skill assessment using intraoperative tool motion in the operating room (OR) has focused on highly-structured surgical tasks such as cholecystectomy. Further, these methods only considered generic motion metrics such as time and number of movements, which are of limited instructive value. In this paper, we developed and evaluated an automated approach to the surgical skill assessment of nasal septoplasty in the OR. The obstructed field of view and highly unstructured nature of septoplasty precludes trainees from efficiently learning the procedure. We propose a descriptive structure of septoplasty consisting of two types of activity: (1) brushing activity directed away from the septum plane characterizing the consistency of the surgeon's wrist motion and (2) activity along the septal plane characterizing the surgeon's coverage pattern. We derived features related to these two activity types that classify a surgeon's level of training with an average accuracy of about 72%. The features we developed provide surgeons with personalized, actionable feedback regarding their tool motion.