 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Real-World Autonomous Driving by Learning to Predict and Plan with a Mixture of Experts
Nov 03, 2022The goal of autonomous vehicles is to navigate public roads safely and comfortably. To enforce safety, traditional planning approaches rely on handcrafted rules to generate trajectories. Machine learning-based systems, on the other hand, scale with data and are able to learn more complex behaviors. However, they often ignore that agents and self-driving vehicle trajectory distributions can be leveraged to improve safety. In this paper, we propose modeling a distribution over multiple future trajectories for both the self-driving vehicle and other road agents, using a unified neural network architecture for prediction and planning. During inference, we select the planning trajectory that minimizes a cost taking into account safety and the predicted probabilities. Our approach does not depend on any rule-based planners for trajectory generation or optimization, improves with more training data and is simple to implement. We extensively evaluate our method through a realistic simulator and show that the predicted trajectory distribution corresponds to different driving profiles. We also successfully deploy it on a self-driving vehicle on urban public roads, confirming that it drives safely without compromising comfort. The code for training and testing our model on a public prediction dataset and the video of the road test are available at https://woven.mobi/safepathnet
SafetyNet: Safe planning for real-world self-driving vehicles using machine-learned policies
Sep 28, 2021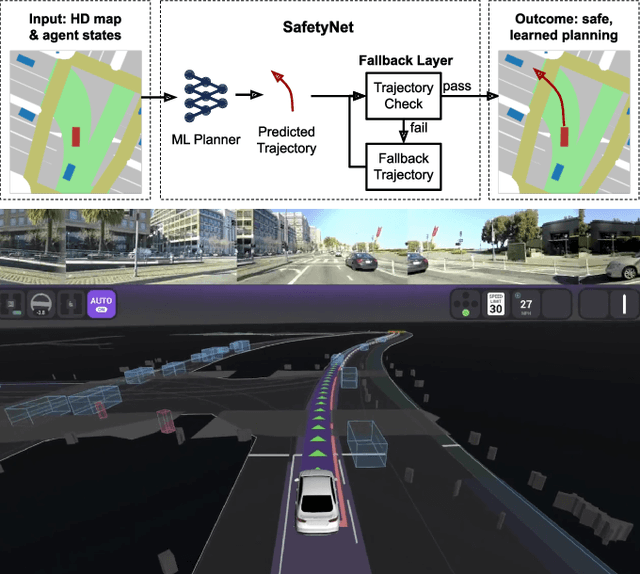
In this paper we present the first safe system for full control of self-driving vehicles trained from human demonstrations and deployed in challenging, real-world, urban environments. Current industry-standard solutions use rule-based systems for planning. Although they perform reasonably well in common scenarios, the engineering complexity renders this approach incompatible with human-level performance. On the other hand, the performance of machine-learned (ML) planning solutions can be improved by simply adding more exemplar data. However, ML methods cannot offer safety guarantees and sometimes behave unpredictably. To combat this, our approach uses a simple yet effective rule-based fallback layer that performs sanity checks on an ML planner's decisions (e.g. avoiding collision, assuring physical feasibility). This allows us to leverage ML to handle complex situations while still assuring the safety, reducing ML planner-only collisions by 95%. We train our ML planner on 300 hours of expert driving demonstrations using imitation learning and deploy it along with the fallback layer in downtown San Francisco, where it takes complete control of a real vehicle and navigates a wide variety of challenging urban driving scenarios.