 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussianVAE: Adaptive Learning Dynamics of 3D Gaussians for High-Fidelity Super-Resolution
Jun 09, 2025We present a novel approach for enhancing the resolution and geometric fidelity of 3D Gaussian Splatting (3DGS) beyond native training resolution. Current 3DGS methods are fundamentally limited by their input resolution, producing reconstructions that cannot extrapolate finer details than are present in the training views. Our work breaks this limitation through a lightweight generative model that predicts and refines additional 3D Gaussians where needed most. The key innovation is our Hessian-assisted sampling strategy, which intelligently identifies regions that are likely to benefit from densification, ensuring computational efficiency. Unlike computationally intensive GANs or diffusion approaches, our method operates in real-time (0.015s per inference on a single consumer-grade GPU), making it practical for interactive applications. Comprehensive experiments demonstrate significant improvements in both geometric accuracy and rendering quality compared to state-of-the-art methods, establishing a new paradigm for resolution-free 3D scene enhancement.
Imagen 3
Aug 13, 2024We introduce Imagen 3, a latent diffusion model that generates high quality images from text prompts. We describe our quality and responsibility evaluations. Imagen 3 is preferred over other state-of-the-art (SOTA) models at the time of evaluation. In addition, we discuss issues around safety and representation, as well as methods we used to minimize the potential harm of our models.
H3DFact: Heterogeneous 3D Integrated CIM for Factorization with Holographic Perceptual Representations
Apr 05, 2024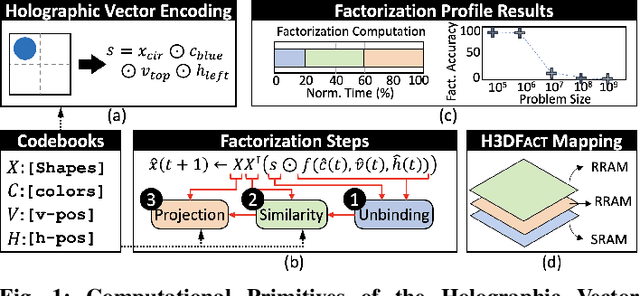
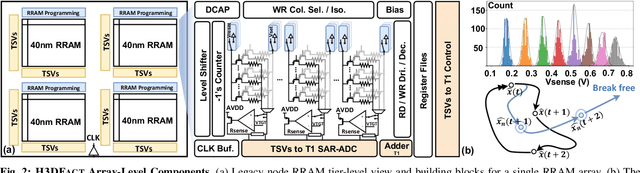
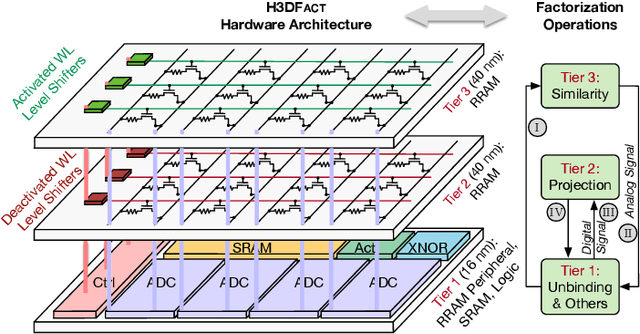
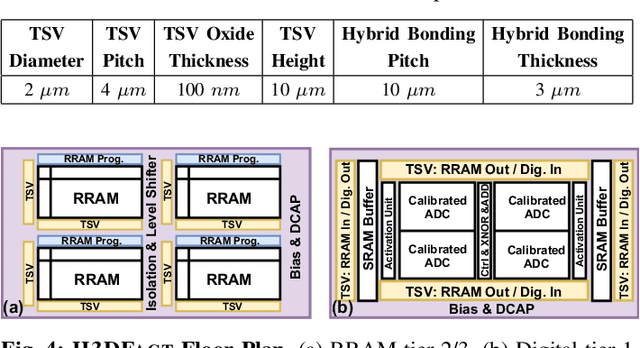
Disentangling attributes of various sensory signals is central to human-like perception and reasoning and a critical task for higher-order cognitive and neuro-symbolic AI systems. An elegant approach to represent this intricate factorization is via high-dimensional holographic vectors drawing on brain-inspired vector symbolic architectures. However, holographic factorization involves iterative computation with high-dimensional matrix-vector multiplications and suffers from non-convergence problems. In this paper, we present H3DFact, a heterogeneous 3D integrated in-memory compute engine capable of efficiently factorizing high-dimensional holographic representations. H3DFact exploits the computation-in-superposition capability of holographic vectors and the intrinsic stochasticity associated with memristive-based 3D compute-in-memory. Evaluated on large-scale factorization and perceptual problems, H3DFact demonstrates superior capability in factorization accuracy and operational capacity by up to five orders of magnitude, with 5.5x compute density, 1.2x energy efficiency improvements, and 5.9x less silicon footprint compared to iso-capacity 2D designs.
ToMoBrush: Exploring Dental Health Sensing using a Sonic Toothbrush
Feb 02, 2024Early detection of dental disease is crucial to prevent adverse outcomes. Today, dental X-rays are currently the most accurate gold standard for dental disease detection. Unfortunately, regular X-ray exam is still a privilege for billions of people around the world. In this paper, we ask: "Can we develop a low-cost sensing system that enables dental self-examination in the comfort of one's home?" This paper presents ToMoBrush, a dental health sensing system that explores using off-the-shelf sonic toothbrushes for dental condition detection. Our solution leverages the fact that a sonic toothbrush produces rich acoustic signals when in contact with teeth, which contain important information about each tooth's status. ToMoBrush extracts tooth resonance signatures from the acoustic signals to characterize varied dental health conditions of the teeth. We evaluate ToMoBrush on 19 participants and dental-standard models for detecting common dental problems including caries, calculus, and food impaction, achieving a detection ROC-AUC of 0.90, 0.83, and 0.88 respectively. Interviews with dental experts validate ToMoBrush's potential in enhancing at-home dental healthcare.
Safe Hierarchical Model Predictive Control and Planning for Autonomous Systems
Mar 27, 2022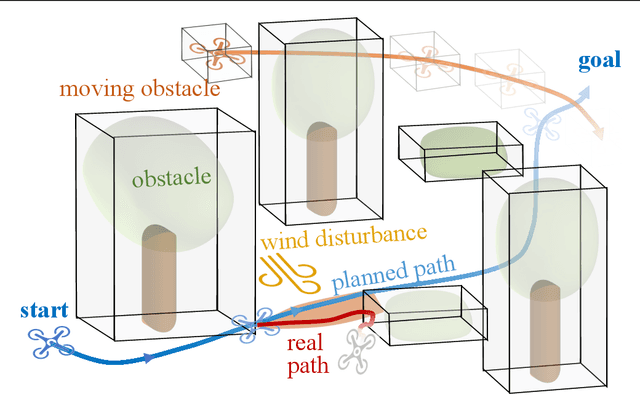



Planning and control for autonomous vehicles usually are hierarchical separated. However, increasing performance demands and operating in highly dynamic environments requires an frequent re-evaluation of the planning and tight integration of control and planning to guarantee safety. We propose an integrated hierarchical predictive control and planning approach to tackle this challenge. Planner and controller are based on the repeated solution of moving horizon optimal control problems. The planner can choose different low-layer controller modes for increased flexibility and performance instead of using a single controller with a large safety margin for collision avoidance under uncertainty. Planning is based on simplified system dynamics and safety, yet flexible operation is ensured by constraint tightening based on a mixed-integer linear programming formulation. A cyclic horizon tube-based model predictive controller guarantees constraint satisfaction for different control modes and disturbances. Examples of such modes are a slow-speed movement with high precision and fast-speed movements with large uncertainty bounds. Allowing for different control modes reduces the conservatism, while the hierarchical decomposition of the problem reduces the computational cost and enables real-time implementation. We derive conditions for recursive feasibility to ensure constraint satisfaction and obstacle avoidance to guarantee safety and ensure compatibility between the layers and modes. Simulation results illustrate the efficiency and applicability of the proposed hierarchical strategy.