 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWholeBodyVLA: Towards Unified Latent VLA for Whole-Body Loco-Manipulation Control
Dec 15, 2025Humanoid robots require precise locomotion and dexterous manipulation to perform challenging loco-manipulation tasks. Yet existing approaches, modular or end-to-end, are deficient in manipulation-aware locomotion. This confines the robot to a limited workspace, preventing it from performing large-space loco-manipulation. We attribute this to: (1) the challenge of acquiring loco-manipulation knowledge due to the scarcity of humanoid teleoperation data, and (2) the difficulty of faithfully and reliably executing locomotion commands, stemming from the limited precision and stability of existing RL controllers. To acquire richer loco-manipulation knowledge, we propose a unified latent learning framework that enables Vision-Language-Action (VLA) system to learn from low-cost action-free egocentric videos. Moreover, an efficient human data collection pipeline is devised to augment the dataset and scale the benefits. To execute the desired locomotion commands more precisely, we present a loco-manipulation-oriented (LMO) RL policy specifically tailored for accurate and stable core loco-manipulation movements, such as advancing, turning, and squatting. Building on these components, we introduce WholeBodyVLA, a unified framework for humanoid loco-manipulation. To the best of our knowledge, WholeBodyVLA is one of its kind enabling large-space humanoid loco-manipulation. It is verified via comprehensive experiments on the AgiBot X2 humanoid, outperforming prior baseline by 21.3%. It also demonstrates strong generalization and high extensibility across a broad range of tasks.
EmbodiedOneVision: Interleaved Vision-Text-Action Pretraining for General Robot Control
Aug 28, 2025The human ability to seamlessly perform multimodal reasoning and physical interaction in the open world is a core goal for general-purpose embodied intelligent systems. Recent vision-language-action (VLA) models, which are co-trained on large-scale robot and visual-text data, have demonstrated notable progress in general robot control. However, they still fail to achieve human-level flexibility in interleaved reasoning and interaction. In this work, introduce EO-Robotics, consists of EO-1 model and EO-Data1.5M dataset. EO-1 is a unified embodied foundation model that achieves superior performance in multimodal embodied reasoning and robot control through interleaved vision-text-action pre-training. The development of EO-1 is based on two key pillars: (i) a unified architecture that processes multimodal inputs indiscriminately (image, text, video, and action), and (ii) a massive, high-quality multimodal embodied reasoning dataset, EO-Data1.5M, which contains over 1.5 million samples with emphasis on interleaved vision-text-action comprehension. EO-1 is trained through synergies between auto-regressive decoding and flow matching denoising on EO-Data1.5M, enabling seamless robot action generation and multimodal embodied reasoning. Extensive experiments demonstrate the effectiveness of interleaved vision-text-action learning for open-world understanding and generalization, validated through a variety of long-horizon, dexterous manipulation tasks across multiple embodiments. This paper details the architecture of EO-1, the data construction strategy of EO-Data1.5M, and the training methodology, offering valuable insights for developing advanced embodied foundation models.
Is Diversity All You Need for Scalable Robotic Manipulation?
Jul 08, 2025Data scaling has driven remarkable success in foundation models for Natural Language Processing (NLP) and Computer Vision (CV), yet the principles of effective data scaling in robotic manipulation remain insufficiently understood. In this work, we investigate the nuanced role of data diversity in robot learning by examining three critical dimensions-task (what to do), embodiment (which robot to use), and expert (who demonstrates)-challenging the conventional intuition of "more diverse is better". Throughout extensive experiments on various robot platforms, we reveal that (1) task diversity proves more critical than per-task demonstration quantity, benefiting transfer from diverse pre-training tasks to novel downstream scenarios; (2) multi-embodiment pre-training data is optional for cross-embodiment transfer-models trained on high-quality single-embodiment data can efficiently transfer to different platforms, showing more desirable scaling property during fine-tuning than multi-embodiment pre-trained models; and (3) expert diversity, arising from individual operational preferences and stochastic variations in human demonstrations, can be confounding to policy learning, with velocity multimodality emerging as a key contributing factor. Based on this insight, we propose a distribution debiasing method to mitigate velocity ambiguity, the yielding GO-1-Pro achieves substantial performance gains of 15%, equivalent to using 2.5 times pre-training data. Collectively, these findings provide new perspectives and offer practical guidance on how to scale robotic manipulation datasets effectively.
Hume: Introducing System-2 Thinking in Visual-Language-Action Model
May 29, 2025


Humans practice slow thinking before performing actual actions when handling complex tasks in the physical world. This thinking paradigm, recently, has achieved remarkable advancement in boosting Large Language Models (LLMs) to solve complex tasks in digital domains. However, the potential of slow thinking remains largely unexplored for robotic foundation models interacting with the physical world. In this work, we propose Hume: a dual-system Vision-Language-Action (VLA) model with value-guided System-2 thinking and cascaded action denoising, exploring human-like thinking capabilities of Vision-Language-Action models for dexterous robot control. System 2 of Hume implements value-Guided thinking by extending a Vision-Language-Action Model backbone with a novel value-query head to estimate the state-action value of predicted actions. The value-guided thinking is conducted by repeat sampling multiple action candidates and selecting one according to state-action value. System 1 of Hume is a lightweight reactive visuomotor policy that takes System 2 selected action and performs cascaded action denoising for dexterous robot control. At deployment time, System 2 performs value-guided thinking at a low frequency while System 1 asynchronously receives the System 2 selected action candidate and predicts fluid actions in real time. We show that Hume outperforms the existing state-of-the-art Vision-Language-Action models across multiple simulation benchmark and real-robot deployments.
Genie Centurion: Accelerating Scalable Real-World Robot Training with Human Rewind-and-Refine Guidance
May 24, 2025



While Vision-Language-Action (VLA) models show strong generalizability in various tasks, real-world deployment of robotic policy still requires large-scale, high-quality human expert demonstrations. However, passive data collection via human teleoperation is costly, hard to scale, and often biased toward passive demonstrations with limited diversity. To address this, we propose Genie Centurion (GCENT), a scalable and general data collection paradigm based on human rewind-and-refine guidance. When the robot execution failures occur, GCENT enables the system revert to a previous state with a rewind mechanism, after which a teleoperator provides corrective demonstrations to refine the policy. This framework supports a one-human-to-many-robots supervision scheme with a Task Sentinel module, which autonomously predicts task success and solicits human intervention when necessary, enabling scalable supervision. Empirical results show that GCENT achieves up to 40% higher task success rates than state-of-the-art data collection methods, and reaches comparable performance using less than half the data. We also quantify the data yield-to-effort ratio under multi-robot scenarios, demonstrating GCENT's potential for scalable and cost-efficient robot policy training in real-world environments.
AgiBot World Colosseo: A Large-scale Manipulation Platform for Scalable and Intelligent Embodied Systems
Mar 09, 2025We explore how scalable robot data can address real-world challenges for generalized robotic manipulation. Introducing AgiBot World, a large-scale platform comprising over 1 million trajectories across 217 tasks in five deployment scenarios, we achieve an order-of-magnitude increase in data scale compared to existing datasets. Accelerated by a standardized collection pipeline with human-in-the-loop verification, AgiBot World guarantees high-quality and diverse data distribution. It is extensible from grippers to dexterous hands and visuo-tactile sensors for fine-grained skill acquisition. Building on top of data, we introduce Genie Operator-1 (GO-1), a novel generalist policy that leverages latent action representations to maximize data utilization, demonstrating predictable performance scaling with increased data volume. Policies pre-trained on our dataset achieve an average performance improvement of 30% over those trained on Open X-Embodiment, both in in-domain and out-of-distribution scenarios. GO-1 exhibits exceptional capability in real-world dexterous and long-horizon tasks, achieving over 60% success rate on complex tasks and outperforming prior RDT approach by 32%. By open-sourcing the dataset, tools, and models, we aim to democratize access to large-scale, high-quality robot data, advancing the pursuit of scalable and general-purpose intelligence.
Generalizing 6-DoF Grasp Detection via Domain Prior Knowledge
Apr 02, 2024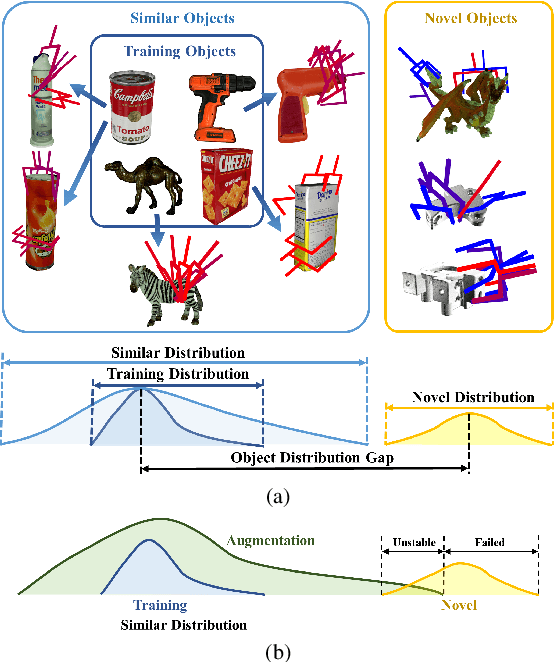
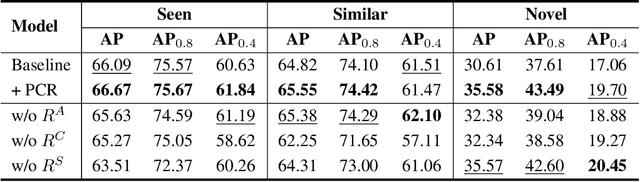
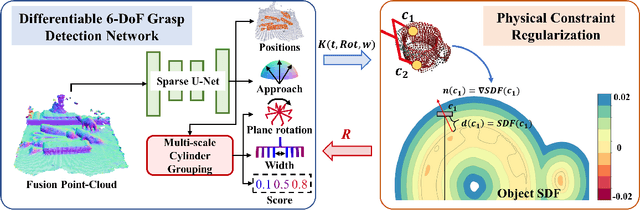

We focus on the generalization ability of the 6-DoF grasp detection method in this paper. While learning-based grasp detection methods can predict grasp poses for unseen objects using the grasp distribution learned from the training set, they often exhibit a significant performance drop when encountering objects with diverse shapes and structures. To enhance the grasp detection methods' generalization ability, we incorporate domain prior knowledge of robotic grasping, enabling better adaptation to objects with significant shape and structure differences. More specifically, we employ the physical constraint regularization during the training phase to guide the model towards predicting grasps that comply with the physical rule on grasping. For the unstable grasp poses predicted on novel objects, we design a contact-score joint optimization using the projection contact map to refine these poses in cluttered scenarios. Extensive experiments conducted on the GraspNet-1billion benchmark demonstrate a substantial performance gain on the novel object set and the real-world grasping experiments also demonstrate the effectiveness of our generalizing 6-DoF grasp detection method.