 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSDNet: Efficient 4D Radar Super-Resolution via Multi-Stage Distillation
Sep 16, 2025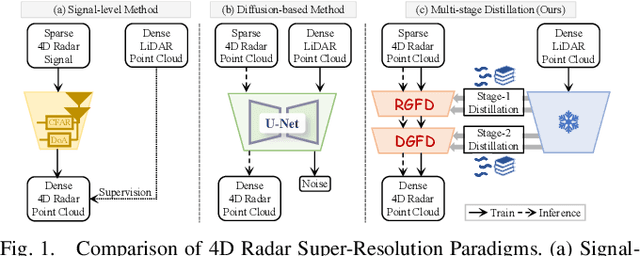
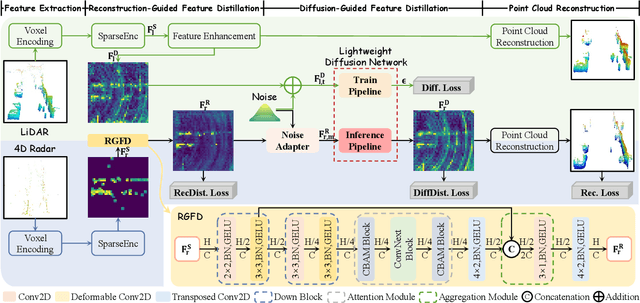
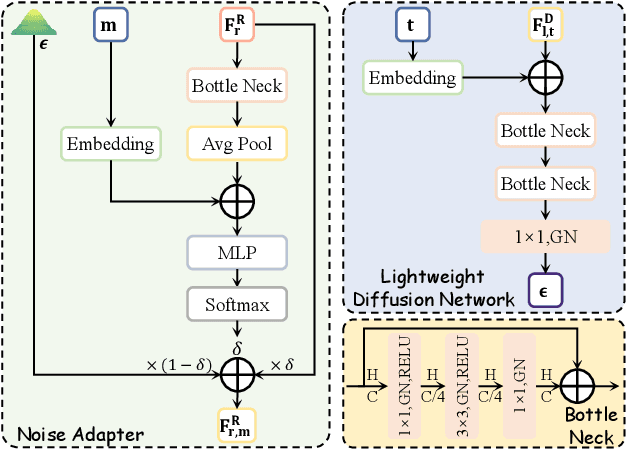
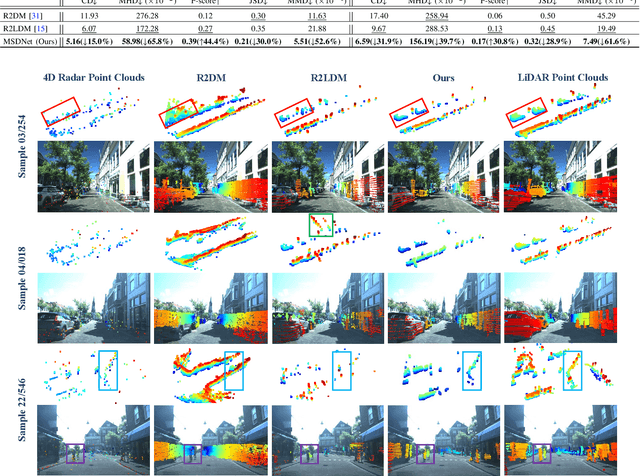
4D radar super-resolution, which aims to reconstruct sparse and noisy point clouds into dense and geometrically consistent representations, is a foundational problem in autonomous perception. However, existing methods often suffer from high training cost or rely on complex diffusion-based sampling, resulting in high inference latency and poor generalization, making it difficult to balance accuracy and efficiency. To address these limitations, we propose MSDNet, a multi-stage distillation framework that efficiently transfers dense LiDAR priors to 4D radar features to achieve both high reconstruction quality and computational efficiency. The first stage performs reconstruction-guided feature distillation, aligning and densifying the student's features through feature reconstruction. In the second stage, we propose diffusion-guided feature distillation, which treats the stage-one distilled features as a noisy version of the teacher's representations and refines them via a lightweight diffusion network. Furthermore, we introduce a noise adapter that adaptively aligns the noise level of the feature with a predefined diffusion timestep, enabling a more precise denoising. Extensive experiments on the VoD and in-house datasets demonstrate that MSDNet achieves both high-fidelity reconstruction and low-latency inference in the task of 4D radar point cloud super-resolution, and consistently improves performance on downstream tasks. The code will be publicly available upon publication.
4DRadar-GS: Self-Supervised Dynamic Driving Scene Reconstruction with 4D Radar
Sep 16, 20253D reconstruction and novel view synthesis are critical for validating autonomous driving systems and training advanced perception models. Recent self-supervised methods have gained significant attention due to their cost-effectiveness and enhanced generalization in scenarios where annotated bounding boxes are unavailable. However, existing approaches, which often rely on frequency-domain decoupling or optical flow, struggle to accurately reconstruct dynamic objects due to imprecise motion estimation and weak temporal consistency, resulting in incomplete or distorted representations of dynamic scene elements. To address these challenges, we propose 4DRadar-GS, a 4D Radar-augmented self-supervised 3D reconstruction framework tailored for dynamic driving scenes. Specifically, we first present a 4D Radar-assisted Gaussian initialization scheme that leverages 4D Radar's velocity and spatial information to segment dynamic objects and recover monocular depth scale, generating accurate Gaussian point representations. In addition, we propose a Velocity-guided PointTrack (VGPT) model, which is jointly trained with the reconstruction pipeline under scene flow supervision, to track fine-grained dynamic trajectories and construct temporally consistent representations. Evaluated on the OmniHD-Scenes dataset, 4DRadar-GS achieves state-of-the-art performance in dynamic driving scene 3D reconstruction.
TDFANet: Encoding Sequential 4D Radar Point Clouds Using Trajectory-Guided Deformable Feature Aggregation for Place Recognition
Apr 07, 2025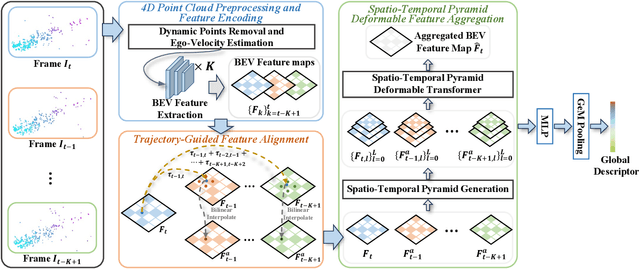
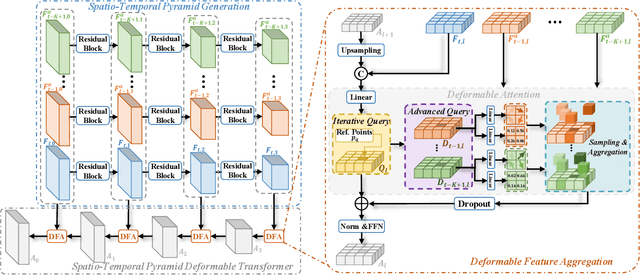
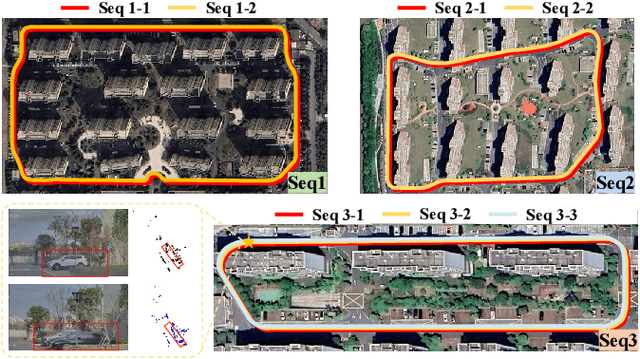

Place recognition is essential for achieving closed-loop or global positioning in autonomous vehicles and mobile robots. Despite recent advancements in place recognition using 2D cameras or 3D LiDAR, it remains to be seen how to use 4D radar for place recognition - an increasingly popular sensor for its robustness against adverse weather and lighting conditions. Compared to LiDAR point clouds, radar data are drastically sparser, noisier and in much lower resolution, which hampers their ability to effectively represent scenes, posing significant challenges for 4D radar-based place recognition. This work addresses these challenges by leveraging multi-modal information from sequential 4D radar scans and effectively extracting and aggregating spatio-temporal features.Our approach follows a principled pipeline that comprises (1) dynamic points removal and ego-velocity estimation from velocity property, (2) bird's eye view (BEV) feature encoding on the refined point cloud, (3) feature alignment using BEV feature map motion trajectory calculated by ego-velocity, (4) multi-scale spatio-temporal features of the aligned BEV feature maps are extracted and aggregated.Real-world experimental results validate the feasibility of the proposed method and demonstrate its robustness in handling dynamic environments. Source codes are available.
R2LDM: An Efficient 4D Radar Super-Resolution Framework Leveraging Diffusion Model
Mar 21, 2025We introduce R2LDM, an innovative approach for generating dense and accurate 4D radar point clouds, guided by corresponding LiDAR point clouds. Instead of utilizing range images or bird's eye view (BEV) images, we represent both LiDAR and 4D radar point clouds using voxel features, which more effectively capture 3D shape information. Subsequently, we propose the Latent Voxel Diffusion Model (LVDM), which performs the diffusion process in the latent space. Additionally, a novel Latent Point Cloud Reconstruction (LPCR) module is utilized to reconstruct point clouds from high-dimensional latent voxel features. As a result, R2LDM effectively generates LiDAR-like point clouds from paired raw radar data. We evaluate our approach on two different datasets, and the experimental results demonstrate that our model achieves 6- to 10-fold densification of radar point clouds, outperforming state-of-the-art baselines in 4D radar point cloud super-resolution. Furthermore, the enhanced radar point clouds generated by our method significantly improve downstream tasks, achieving up to 31.7% improvement in point cloud registration recall rate and 24.9% improvement in object detection accuracy.