 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedBRB: An Effective Solution to the Small-to-Large Scenario in Device-Heterogeneity Federated Learning
Feb 27, 2024



Recently, the success of large models has demonstrated the importance of scaling up model size. This has spurred interest in exploring collaborative training of large-scale models from federated learning perspective. Due to computational constraints, many institutions struggle to train a large-scale model locally. Thus, training a larger global model using only smaller local models has become an important scenario (i.e., the \textbf{small-to-large scenario}). Although recent device-heterogeneity federated learning approaches have started to explore this area, they face limitations in fully covering the parameter space of the global model. In this paper, we propose a method called \textbf{FedBRB} (\underline{B}lock-wise \underline{R}olling and weighted \underline{B}roadcast) based on the block concept. FedBRB can uses small local models to train all blocks of the large global model, and broadcasts the trained parameters to the entire space for faster information interaction. Experiments demonstrate FedBRB yields substantial performance gains, achieving state-of-the-art results in this scenario. Moreover, FedBRB using only minimal local models can even surpass baselines using larger local models.
First realization of macroscopic Fourier ptychography for hundred-meter distance sub-diffraction imaging
Oct 23, 2023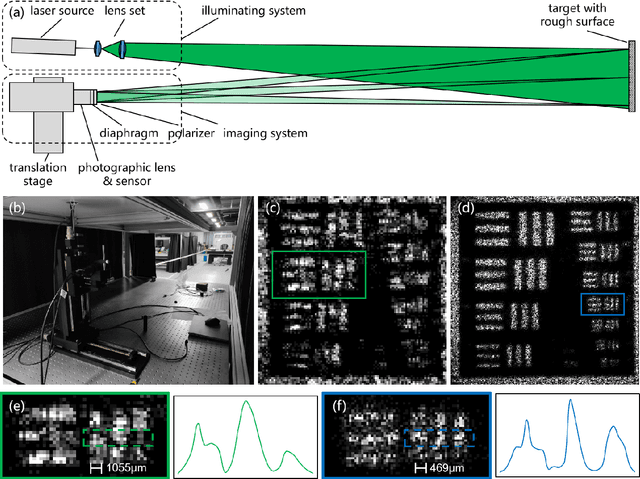
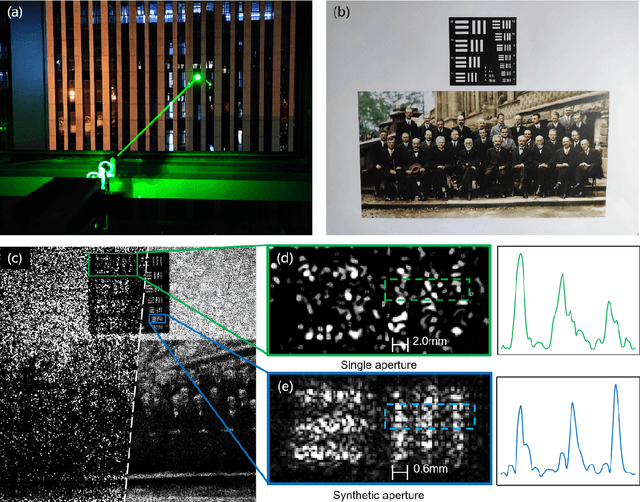
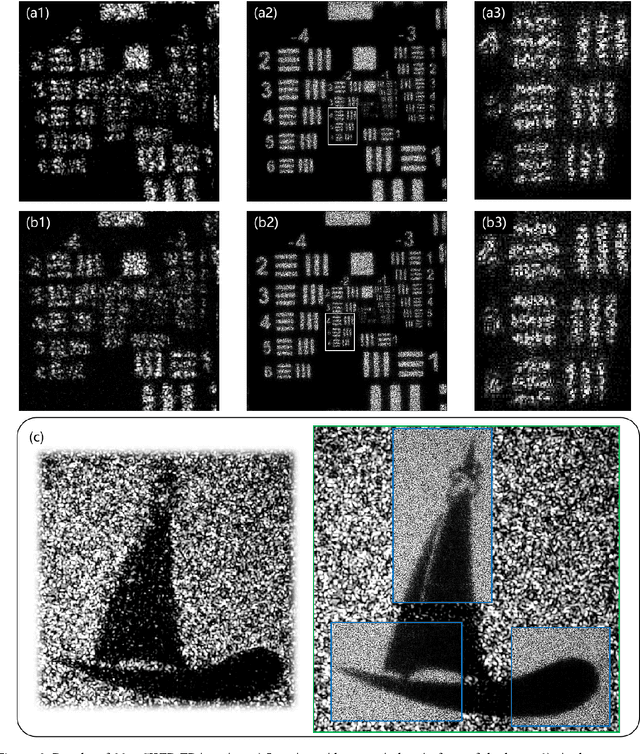
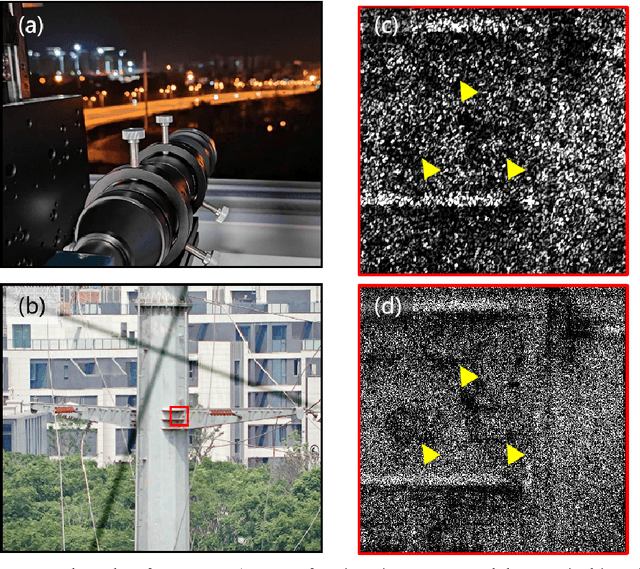
Fourier ptychography (FP) imaging, drawing on the idea of synthetic aperture, has been demonstrated as a potential approach for remote sub-diffraction-limited imaging. Nevertheless, the farthest imaging distance is still limited around 10 m even though there has been a significant improvement in macroscopic FP. The most severely issue in increasing the imaging distance is FoV limitation caused by far-field condition for diffraction. Here, we propose to modify the Fourier far-field condition for rough reflective objects, aiming to overcome the small FoV limitation by using a divergent beam to illuminate objects. A joint optimization of pupil function and target image is utilized to attain the aberration-free image while estimating the pupil function simultaneously. Benefiting from the optimized reconstruction algorithm which effectively expands the camera's effective aperture, we experimentally implement several FP systems suited for imaging distance of 12 m, 90 m, and 170 m with the maximum synthetic aperture of 200 mm. The maximum imaging distance and synthetic aperture are thus improved by more than one order of magnitude of the state-of-the-art works with a fourfold improvement in the resolution. Our findings demonstrate significant potential for advancing the field of macroscopic FP, propelling it into a new stage of development.
Rethinking the Performance of ISAC System: From Efficiency and Utility Perspectives
Aug 18, 2022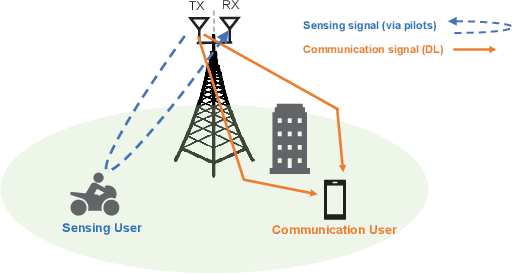
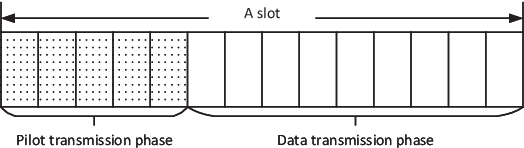
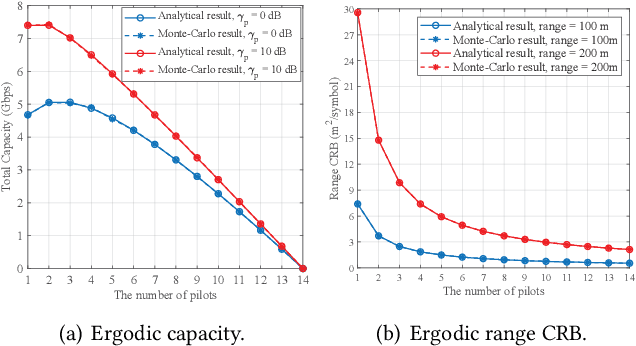
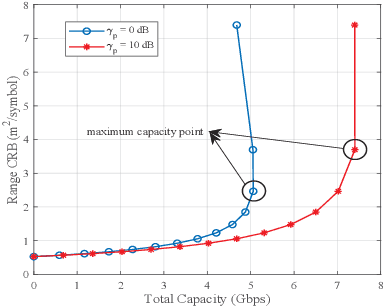
Integrated sensing and communications (ISAC) is an essential technology for the 6G communication system, which enables the conventional wireless communication network capable of sensing targets around. The shared use of pilots is a promising strategy to achieve ISAC. It brings a trade-off between communication and sensing, which is still unclear under the imperfect channel estimation condition. To provide some insights, the trade-off between ergodic capacity with imperfect channel estimation and ergodic Cramer-Rao bound (CRB) of range sensing is investigated. Firstly, the closedform expressions of ergodic capacity and ergodic range CRB are derived, which are associated with the number of pilots. Secondly, two novel metrics named efficiency and utility are firstly proposed to evaluate the joint performance of capacity and range sensing error. Specifically, efficiency is used to evaluate the achievable capacity per unit of the sensing error, and utility is designed to evaluate the utilization degree of ISAC. Moreover, an algorithm of pilot length optimization is designed to achieve the best efficiency. Finally, simulation results are given to verify the accuracy of analytical results, and provide some insights on designing the slot structure.