 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerahertz Wireless Data Center: Gaussian Beam or Airy Beam?
Apr 29, 2025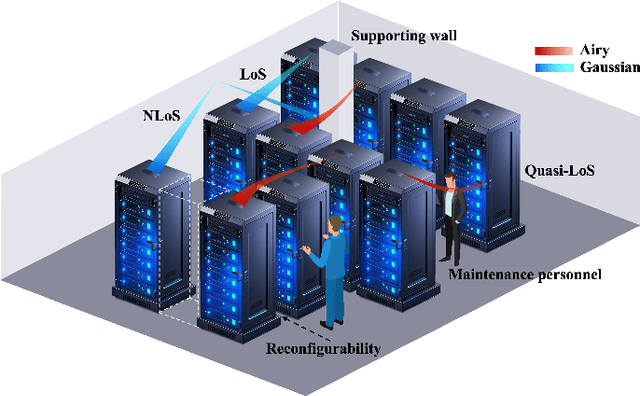
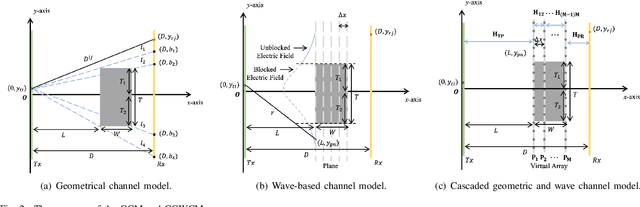
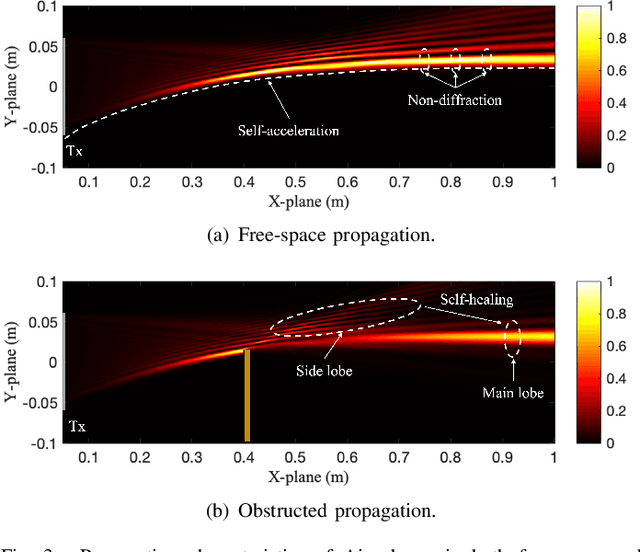
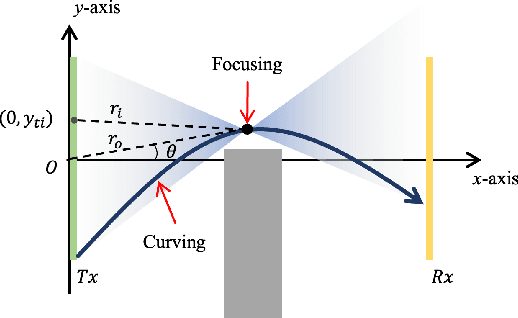
Terahertz (THz) communication is emerging as a pivotal enabler for 6G and beyond wireless systems owing to its multi-GHz bandwidth. One of its novel applications is in wireless data centers, where it enables ultra-high data rates while enhancing network reconfigurability and scalability. However, due to numerous racks, supporting walls, and densely deployed antennas, the line-of-sight (LoS) path in data centers is often instead of fully obstructed, resulting in quasi-LoS propagation and degradation of spectral efficiency. To address this issue, Airy beam-based hybrid beamforming is investigated in this paper as a promising technique to mitigate quasi-LoS propagation and enhance spectral efficiency in THz wireless data centers. Specifically, a cascaded geometrical and wave-based channel model (CGWCM) is proposed for quasi-LoS scenarios, which accounts for diffraction effects while being more simplified than conventional wave-based model. Then, the characteristics and generation of the Airy beam are analyzed, and beam search methods for quasi-LoS scenarios are proposed, including hierarchical focusing-Airy beam search, and low-complexity beam search. Simulation results validate the effectiveness of the CGWCM and demonstrate the superiority of the Airy beam over Gaussian beams in mitigating blockages, verifying its potential for practical THz wireless communication in data centers.
A Survey on Orthogonal Time Frequency Space: New Delay Doppler Communications Paradigm in 6G era
Nov 23, 2022



In 6G era, the space-air-ground integrated networks (SAGIN) are expected to provide global coverage and thus are required to support a wide range of emerging applications in hostile environments with high-mobility. In such scenarios, conventional orthogonal frequency division multiplexing (OFDM) modulation, which has been widely deployed in the cellular and Wi-Fi communications systems, will suffer from performance degradation due to high Doppler shift. To address this challenge, a new two-dimensional (2D) modulation scheme referred to as orthogonal time frequency space (OTFS) was proposed and has been recognized as an enabling technology for future high-mobility scenarios. In particular, OTFS modulates information in the delay-Doppler (DD) domain rather than the time-frequency (TF) domain for OFDM, providing the benefits of Doppler-resilience and delay-resilience, low signaling latency, low peak-to-average ratio (PAPR), and low-complexity implementation. Recent researches also show that the direct interaction of information and physical world in the DD domain makes OTFS an promising waveform for realizing integrated sensing and communications (ISAC). In this article, we will present a comprehensive survey of OTFS technology in 6G era, including the fundamentals, recent advances, and future works. Our aim is that this article could provide valuable references for all researchers working in the area of OTFS.
Rethinking the Performance of ISAC System: From Efficiency and Utility Perspectives
Aug 18, 2022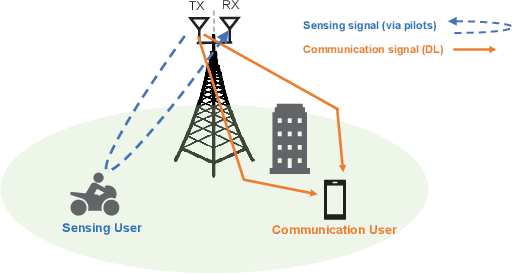
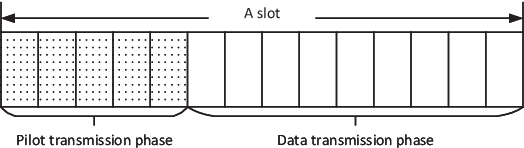
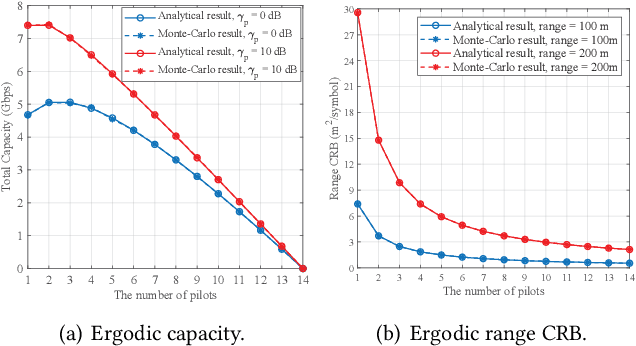
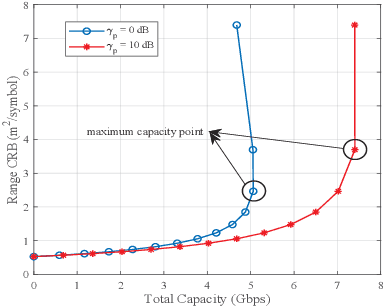
Integrated sensing and communications (ISAC) is an essential technology for the 6G communication system, which enables the conventional wireless communication network capable of sensing targets around. The shared use of pilots is a promising strategy to achieve ISAC. It brings a trade-off between communication and sensing, which is still unclear under the imperfect channel estimation condition. To provide some insights, the trade-off between ergodic capacity with imperfect channel estimation and ergodic Cramer-Rao bound (CRB) of range sensing is investigated. Firstly, the closedform expressions of ergodic capacity and ergodic range CRB are derived, which are associated with the number of pilots. Secondly, two novel metrics named efficiency and utility are firstly proposed to evaluate the joint performance of capacity and range sensing error. Specifically, efficiency is used to evaluate the achievable capacity per unit of the sensing error, and utility is designed to evaluate the utilization degree of ISAC. Moreover, an algorithm of pilot length optimization is designed to achieve the best efficiency. Finally, simulation results are given to verify the accuracy of analytical results, and provide some insights on designing the slot structure.
Accelerating Federated Edge Learning via Optimized Probabilistic Device Scheduling
Jul 24, 2021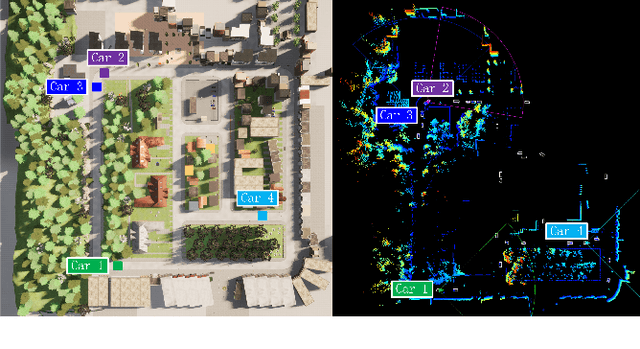
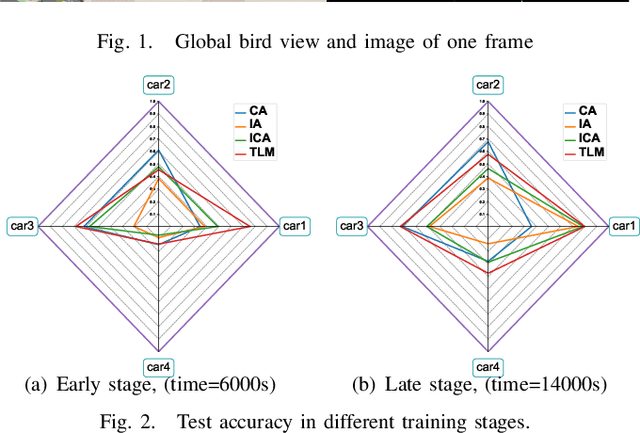
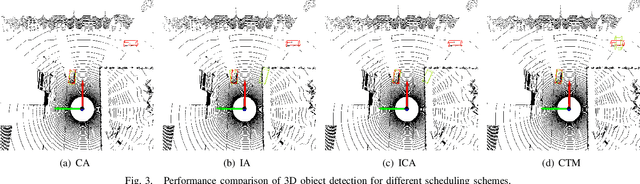
The popular federated edge learning (FEEL) framework allows privacy-preserving collaborative model training via frequent learning-updates exchange between edge devices and server. Due to the constrained bandwidth, only a subset of devices can upload their updates at each communication round. This has led to an active research area in FEEL studying the optimal device scheduling policy for minimizing communication time. However, owing to the difficulty in quantifying the exact communication time, prior work in this area can only tackle the problem partially by considering either the communication rounds or per-round latency, while the total communication time is determined by both metrics. To close this gap, we make the first attempt in this paper to formulate and solve the communication time minimization problem. We first derive a tight bound to approximate the communication time through cross-disciplinary effort involving both learning theory for convergence analysis and communication theory for per-round latency analysis. Building on the analytical result, an optimized probabilistic scheduling policy is derived in closed-form by solving the approximate communication time minimization problem. It is found that the optimized policy gradually turns its priority from suppressing the remaining communication rounds to reducing per-round latency as the training process evolves. The effectiveness of the proposed scheme is demonstrated via a use case on collaborative 3D objective detection in autonomous driving.