 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating Human Memory with Language Models
May 25, 2026Language models are increasingly being deployed as user simulators, but their memory is far more reliable than that of real users. To measure this gap, we run a series of classic memory experiments from psychology on both humans and language models. Across tasks, we find that out-of-the-box language models exhibit better memory than humans, even when prompted to imitate human behavior. We then show that better prompting strategies and the use of a compactor can cause language models to forget content in a more human-like way. Using these methods, we show preliminary evidence that language models with human-like memory constraints can function as more effective user simulators in a downstream education task. Finally, we release human reference data and benchmarks to support future work on simulating human memory with language models.
Pruning the Path to Optimal Care: Identifying Systematically Suboptimal Medical Decision-Making with Inverse Reinforcement Learning
Nov 07, 2024In aims to uncover insights into medical decision-making embedded within observational data from clinical settings, we present a novel application of Inverse Reinforcement Learning (IRL) that identifies suboptimal clinician actions based on the actions of their peers. This approach centers two stages of IRL with an intermediate step to prune trajectories displaying behavior that deviates significantly from the consensus. This enables us to effectively identify clinical priorities and values from ICU data containing both optimal and suboptimal clinician decisions. We observe that the benefits of removing suboptimal actions vary by disease and differentially impact certain demographic groups.
End-to-End Multimodal Representation Learning for Video Dialog
Oct 26, 2022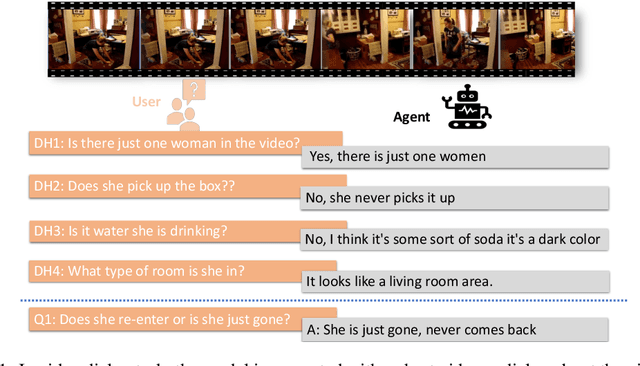

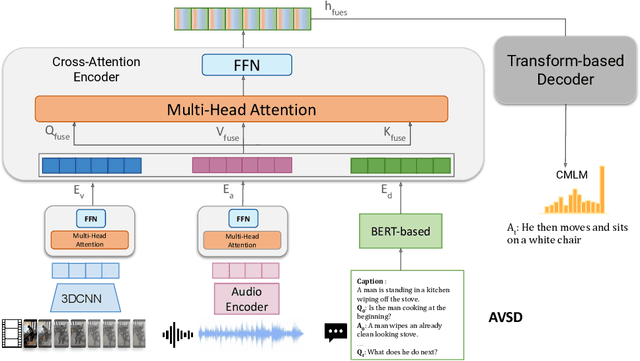

Video-based dialog task is a challenging multimodal learning task that has received increasing attention over the past few years with state-of-the-art obtaining new performance records. This progress is largely powered by the adaptation of the more powerful transformer-based language encoders. Despite this progress, existing approaches do not effectively utilize visual features to help solve tasks. Recent studies show that state-of-the-art models are biased toward textual information rather than visual cues. In order to better leverage the available visual information, this study proposes a new framework that combines 3D-CNN network and transformer-based networks into a single visual encoder to extract more robust semantic representations from videos. The visual encoder is jointly trained end-to-end with other input modalities such as text and audio. Experiments on the AVSD task show significant improvement over baselines in both generative and retrieval tasks.
Self-Supervised Representation Learning for CAD
Oct 19, 2022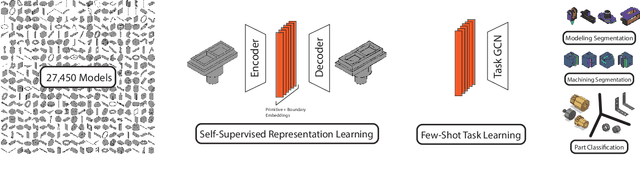
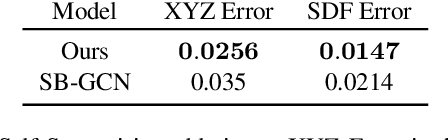
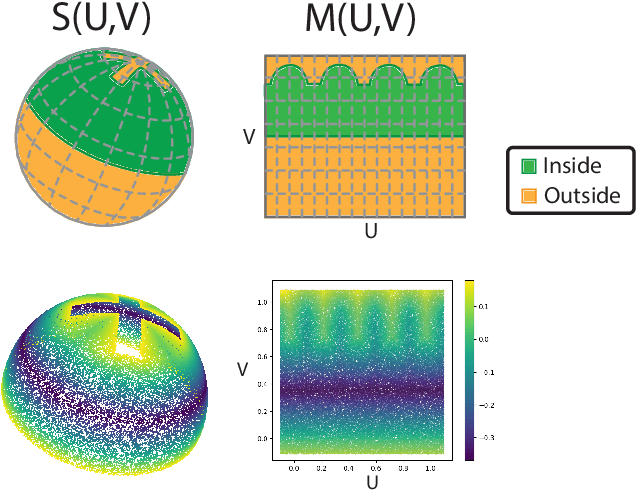
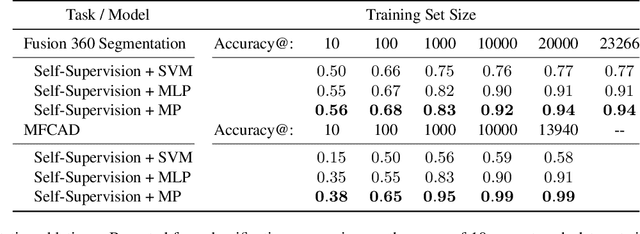
The design of man-made objects is dominated by computer aided design (CAD) tools. Assisting design with data-driven machine learning methods is hampered by lack of labeled data in CAD's native format; the parametric boundary representation (B-Rep). Several data sets of mechanical parts in B-Rep format have recently been released for machine learning research. However, large scale databases are largely unlabeled, and labeled datasets are small. Additionally, task specific label sets are rare, and costly to annotate. This work proposes to leverage unlabeled CAD geometry on supervised learning tasks. We learn a novel, hybrid implicit/explicit surface representation for B-Rep geometry, and show that this pre-training significantly improves few-shot learning performance and also achieves state-of-the-art performance on several existing B-Rep benchmarks.
Safe Reinforcement Learning with Natural Language Constraints
Oct 11, 2020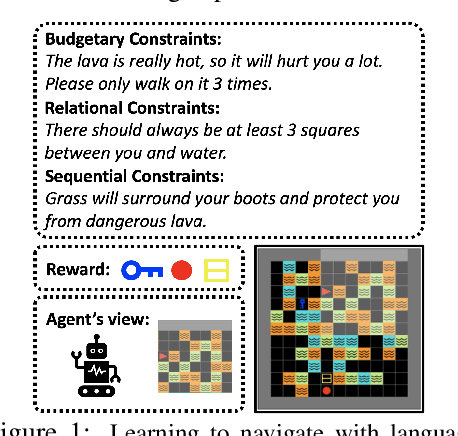
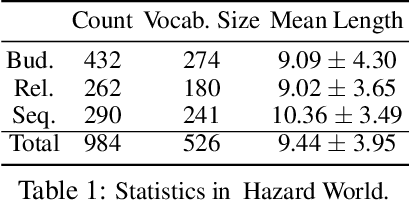
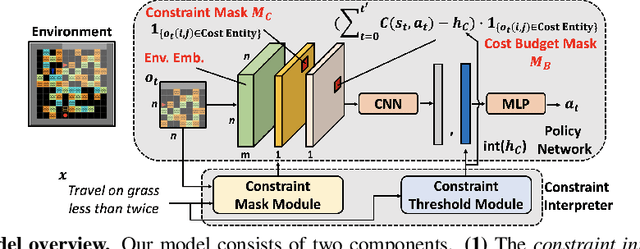
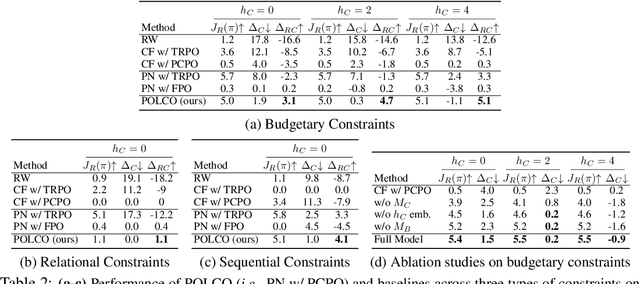
In this paper, we tackle the problem of learning control policies for tasks when provided with constraints in natural language. In contrast to instruction following, language here is used not to specify goals, but rather to describe situations that an agent must avoid during its exploration of the environment. Specifying constraints in natural language also differs from the predominant paradigm in safe reinforcement learning, where safety criteria are enforced by hand-defined cost functions. While natural language allows for easy and flexible specification of safety constraints and budget limitations, its ambiguous nature presents a challenge when mapping these specifications into representations that can be used by techniques for safe reinforcement learning. To address this, we develop a model that contains two components: (1) a constraint interpreter to encode natural language constraints into vector representations capturing spatial and temporal information on forbidden states, and (2) a policy network that uses these representations to output a policy with minimal constraint violations. Our model is end-to-end differentiable and we train it using a recently proposed algorithm for constrained policy optimization. To empirically demonstrate the effectiveness of our approach, we create a new benchmark task for autonomous navigation with crowd-sourced free-form text specifying three different types of constraints. Our method outperforms several baselines by achieving 6-7 times higher returns and 76% fewer constraint violations on average. Dataset and code to reproduce our experiments are available at https://sites.google.com/view/polco-hazard-world/.