 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntent Tagging: Exploring Micro-Prompting Interactions for Supporting Granular Human-GenAI Co-Creation Workflows
Feb 26, 2025Despite Generative AI (GenAI) systems' potential for enhancing content creation, users often struggle to effectively integrate GenAI into their creative workflows. Core challenges include misalignment of AI-generated content with user intentions (intent elicitation and alignment), user uncertainty around how to best communicate their intents to the AI system (prompt formulation), and insufficient flexibility of AI systems to support diverse creative workflows (workflow flexibility). Motivated by these challenges, we created IntentTagger: a system for slide creation based on the notion of Intent Tags - small, atomic conceptual units that encapsulate user intent - for exploring granular and non-linear micro-prompting interactions for Human-GenAI co-creation workflows. Our user study with 12 participants provides insights into the value of flexibly expressing intent across varying levels of ambiguity, meta-intent elicitation, and the benefits and challenges of intent tag-driven workflows. We conclude by discussing the broader implications of our findings and design considerations for GenAI-supported content creation workflows.
Interactive-Rate Supervisory Control for Arbitrarily-Routed Multi-Tendon Robots via Motion Planning
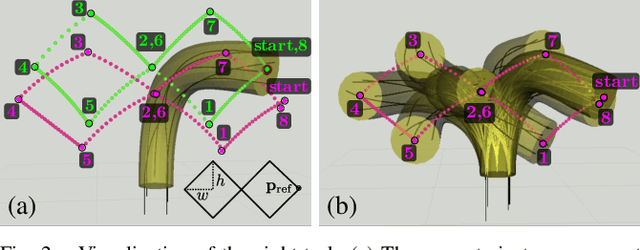
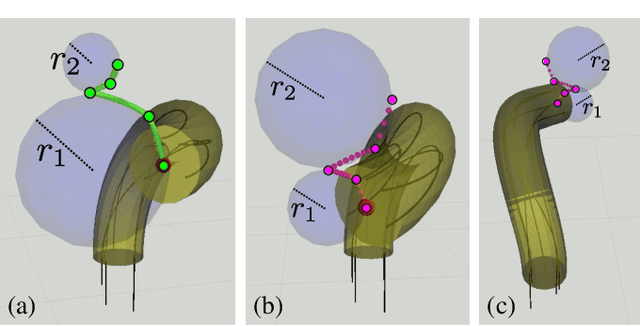
Nov 29, 2022Tendon-driven robots, where one or more tendons under tension bend and manipulate a flexible backbone, can improve minimally invasive surgeries involving difficult-to-reach regions in the human body. Planning motions safely within constrained anatomical environments requires accuracy and efficiency in shape estimation and collision checking. Tendon robots that employ arbitrarily-routed tendons can achieve complex and interesting shapes, enabling them to travel to difficult-to-reach anatomical regions. Arbitrarily-routed tendon-driven robots have unintuitive nonlinear kinematics. Therefore, we envision clinicians leveraging an assistive interactive-rate motion planner to automatically generate collision-free trajectories to clinician-specified destinations during minimally-invasive surgical procedures. Standard motion-planning techniques cannot achieve interactive-rate motion planning with the current expensive tendon robot kinematic models. In this work, we present a 3-phase motion-planning system for arbitrarily-routed tendon-driven robots with a Precompute phase, a Load phase, and a Supervisory Control phase. Our system achieves an interactive rate by developing a fast kinematic model (over 1,000 times faster than current models), a fast voxel collision method (27.6 times faster than standard methods), and leveraging a precomputed roadmap of the entire robot workspace with pre-voxelized vertices and edges. In simulated experiments, we show that our motion-planning method achieves high tip-position accuracy and generates plans at 14.8 Hz on average in a segmented collapsed lung pleural space anatomical environment. Our results show that our method is 17,700 times faster than popular off-the-shelf motion planning algorithms with standard FK and collision detection approaches. Our open-source code is available online.
* 21 pages, 11 figures, preprint of the accepted version to IEEE Access published in July 2022; copyright retained by the authors
Toward Learning Context-Dependent Tasks from Demonstration for Tendon-Driven Surgical Robots
Oct 15, 2021

Tendon-driven robots, a type of continuum robot, have the potential to reduce the invasiveness of surgery by enabling access to difficult-to-reach anatomical targets. In the future, the automation of surgical tasks for these robots may help reduce surgeon strain in the face of a rapidly growing population. However, directly encoding surgical tasks and their associated context for these robots is infeasible. In this work we take steps toward a system that is able to learn to successfully perform context-dependent surgical tasks by learning directly from a set of expert demonstrations. We present three models trained on the demonstrations conditioned on a vector encoding the context of the demonstration. We then use these models to plan and execute motions for the tendon-driven robot similar to the demonstrations for novel context not seen in the training set. We demonstrate the efficacy of our method on three surgery-inspired tasks.
A Novel Shaft-to-Tissue Force Model for Safer Motion Planning of Steerable Needles
Jan 06, 2021



Steerable needles are capable of accurately targeting difficult-to-reach clinical sites in the body. By bending around sensitive anatomical structures, steerable needles have the potential to reduce the invasiveness of many medical procedures. However, inserting these needles with curved trajectories increases the risk of tissue shearing due to large forces being exerted on the surrounding tissue by the needle's shaft. Such shearing can cause significant damage to surrounding tissue, potentially worsening patient outcomes. In this work, we derive a tissue and needle force model based on a Cosserat string formulation, which describes the normal forces and frictional forces along the shaft as a function of the planned needle path, friction parameters, and tip piercing force. We then incorporate this force model as a cost function in an asymptotically near-optimal motion planner and demonstrate the ability to plan motions that consider the tissue normal forces from the needle shaft during planning in a simulated steering environment and a simulated lung tumor biopsy scenario. By planning motions for the needle that aim to minimize the tissue normal force explicitly, our method plans needle paths that reduce the risk of tissue shearing while still reaching desired targets in the body.