 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Data Contamination in LLMs via In-Context Learning
Oct 30, 2025We present Contamination Detection via Context (CoDeC), a practical and accurate method to detect and quantify training data contamination in large language models. CoDeC distinguishes between data memorized during training and data outside the training distribution by measuring how in-context learning affects model performance. We find that in-context examples typically boost confidence for unseen datasets but may reduce it when the dataset was part of training, due to disrupted memorization patterns. Experiments show that CoDeC produces interpretable contamination scores that clearly separate seen and unseen datasets, and reveals strong evidence of memorization in open-weight models with undisclosed training corpora. The method is simple, automated, and both model- and dataset-agnostic, making it easy to integrate with benchmark evaluations.
What Matters in Hierarchical Search for Combinatorial Reasoning Problems?
Jun 05, 2024Efficiently tackling combinatorial reasoning problems, particularly the notorious NP-hard tasks, remains a significant challenge for AI research. Recent efforts have sought to enhance planning by incorporating hierarchical high-level search strategies, known as subgoal methods. While promising, their performance against traditional low-level planners is inconsistent, raising questions about their application contexts. In this study, we conduct an in-depth exploration of subgoal-planning methods for combinatorial reasoning. We identify the attributes pivotal for leveraging the advantages of high-level search: hard-to-learn value functions, complex action spaces, presence of dead ends in the environment, or using data collected from diverse experts. We propose a consistent evaluation methodology to achieve meaningful comparisons between methods and reevaluate the state-of-the-art algorithms.
Fast and Precise: Adjusting Planning Horizon with Adaptive Subgoal Search
Jun 01, 2022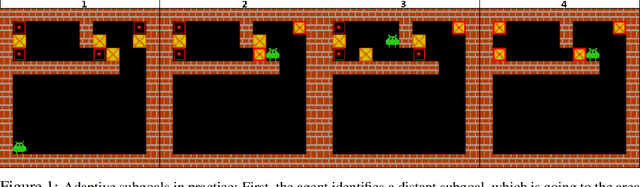
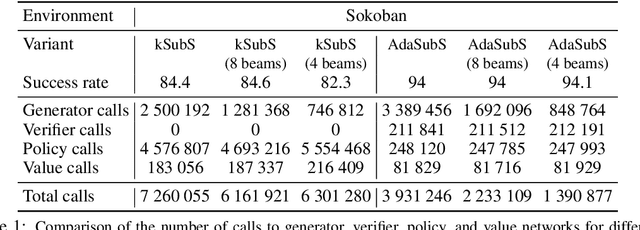
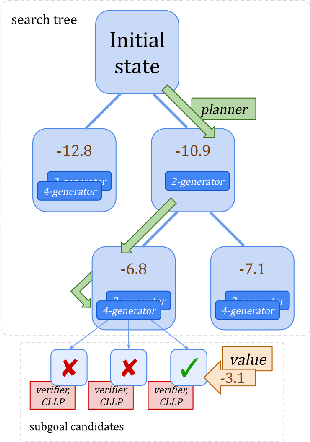
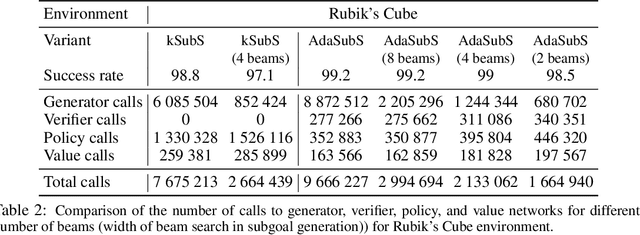
Complex reasoning problems contain states that vary in the computational cost required to determine a good action plan. Taking advantage of this property, we propose Adaptive Subgoal Search (AdaSubS), a search method that adaptively adjusts the planning horizon. To this end, AdaSubS generates diverse sets of subgoals at different distances. A verification mechanism is employed to filter out unreachable subgoals swiftly and thus allowing to focus on feasible further subgoals. In this way, AdaSubS benefits from the efficiency of planning with longer subgoals and the fine control with the shorter ones. We show that AdaSubS significantly surpasses hierarchical planning algorithms on three complex reasoning tasks: Sokoban, the Rubik's Cube, and inequality proving benchmark INT, setting new state-of-the-art on INT.
Off-Policy Correction For Multi-Agent Reinforcement Learning
Nov 22, 2021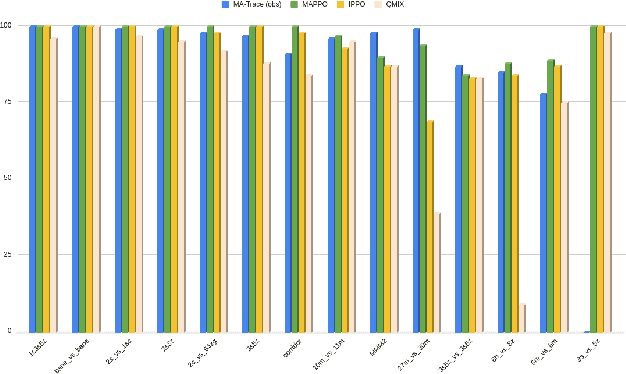
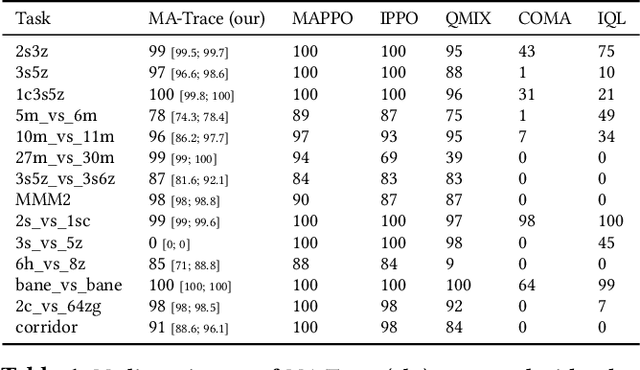
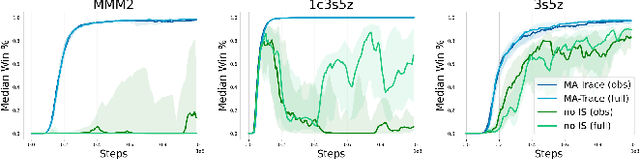
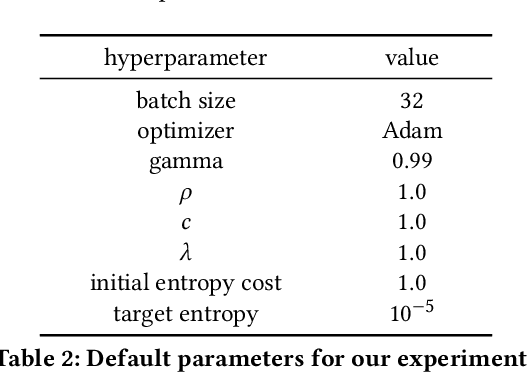
Multi-agent reinforcement learning (MARL) provides a framework for problems involving multiple interacting agents. Despite apparent similarity to the single-agent case, multi-agent problems are often harder to train and analyze theoretically. In this work, we propose MA-Trace, a new on-policy actor-critic algorithm, which extends V-Trace to the MARL setting. The key advantage of our algorithm is its high scalability in a multi-worker setting. To this end, MA-Trace utilizes importance sampling as an off-policy correction method, which allows distributing the computations with no impact on the quality of training. Furthermore, our algorithm is theoretically grounded - we prove a fixed-point theorem that guarantees convergence. We evaluate the algorithm extensively on the StarCraft Multi-Agent Challenge, a standard benchmark for multi-agent algorithms. MA-Trace achieves high performance on all its tasks and exceeds state-of-the-art results on some of them.
Subgoal Search For Complex Reasoning Tasks
Aug 25, 2021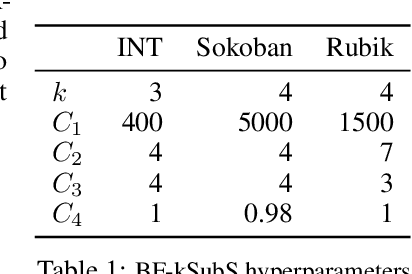
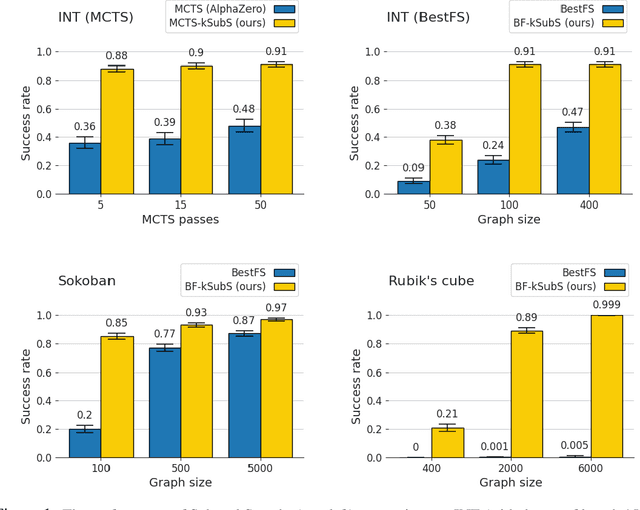
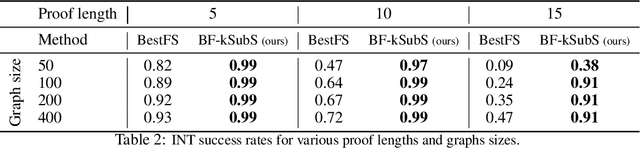
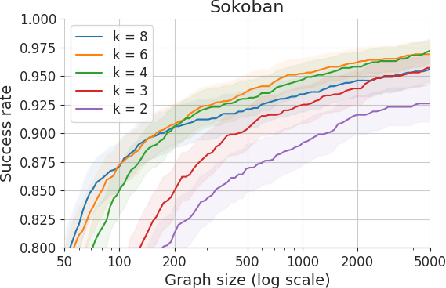
Humans excel in solving complex reasoning tasks through a mental process of moving from one idea to a related one. Inspired by this, we propose Subgoal Search (kSubS) method. Its key component is a learned subgoal generator that produces a diversity of subgoals that are both achievable and closer to the solution. Using subgoals reduces the search space and induces a high-level search graph suitable for efficient planning. In this paper, we implement kSubS using a transformer-based subgoal module coupled with the classical best-first search framework. We show that a simple approach of generating $k$-th step ahead subgoals is surprisingly efficient on three challenging domains: two popular puzzle games, Sokoban and the Rubik's Cube, and an inequality proving benchmark INT. kSubS achieves strong results including state-of-the-art on INT within a modest computational budget.