 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWord Frequency Counting Based on Serverless MapReduce
Jan 01, 2026With the increasing demand for high-performance and high-efficiency computing, cloud computing, especially serverless computing, has gradually become a research hotspot in recent years, attracting numerous research attention. Meanwhile, MapReduce, which is a popular big data processing model in the industry, has been widely applied in various fields. Inspired by the serverless framework of Function as a Service and the high concurrency and robustness of MapReduce programming model, this paper focus on combining them to reduce the time span and increase the efficiency when executing the word frequency counting task. In this case, the paper use a MapReduce programming model based on a serverless computing platform to figure out the most optimized number of Map functions and Reduce functions for a particular task. For the same amount of workload, extensive experiments show both execution time reduces and the overall efficiency of the program improves at different rates as the number of map functions and reduce functions increases. This paper suppose the discovery of the most optimized number of map and reduce functions can help cooperations and programmers figure out the most optimized solutions.
* 6 pages, 4 figures, International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024)
ASM-UNet: Adaptive Scan Mamba Integrating Group Commonalities and Individual Variations for Fine-Grained Segmentation
Aug 10, 2025Precise lesion resection depends on accurately identifying fine-grained anatomical structures. While many coarse-grained segmentation (CGS) methods have been successful in large-scale segmentation (e.g., organs), they fall short in clinical scenarios requiring fine-grained segmentation (FGS), which remains challenging due to frequent individual variations in small-scale anatomical structures. Although recent Mamba-based models have advanced medical image segmentation, they often rely on fixed manually-defined scanning orders, which limit their adaptability to individual variations in FGS. To address this, we propose ASM-UNet, a novel Mamba-based architecture for FGS. It introduces adaptive scan scores to dynamically guide the scanning order, generated by combining group-level commonalities and individual-level variations. Experiments on two public datasets (ACDC and Synapse) and a newly proposed challenging biliary tract FGS dataset, namely BTMS, demonstrate that ASM-UNet achieves superior performance in both CGS and FGS tasks. Our code and dataset are available at https://github.com/YqunYang/ASM-UNet.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Resonant Beam Enabled Passive 3D Positioning
Dec 20, 2024
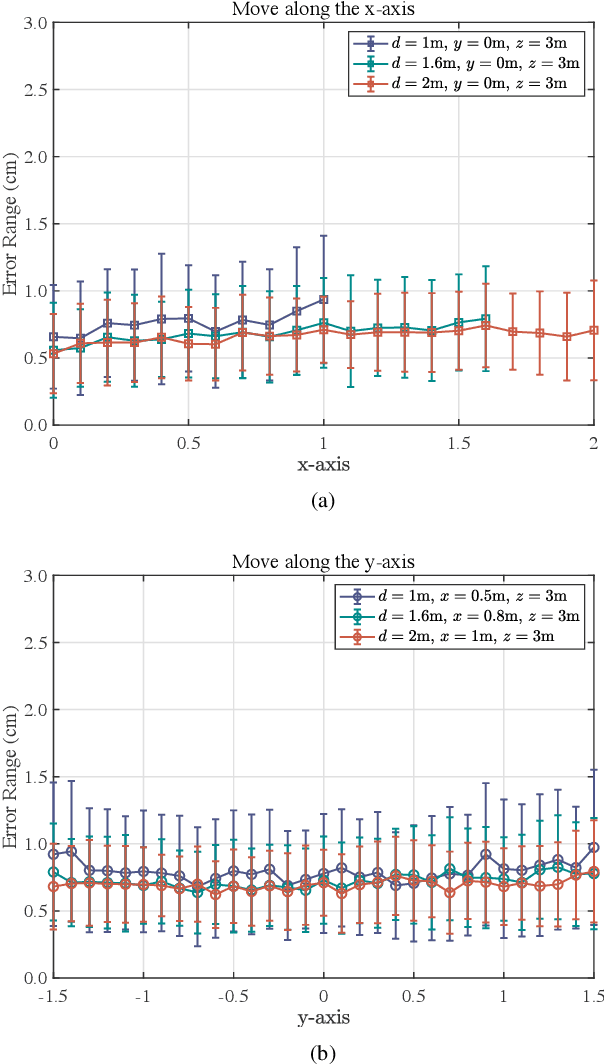

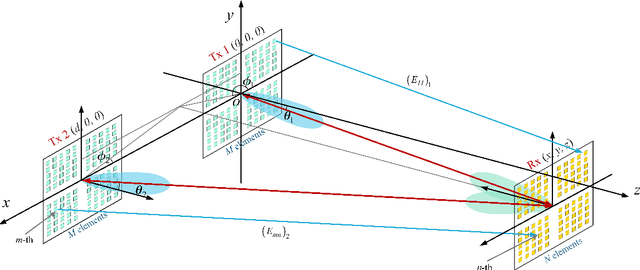
With the rapid development of the internet of things (IoT), location-based services are becoming increasingly prominent in various aspects of social life, and accurate location information is crucial. However, RF-based indoor positioning solutions are severely limited in positioning accuracy due to signal transmission losses and directional difficulties, and optical indoor positioning methods require high propagation conditions. To achieve higher accuracy in indoor positioning, we utilize the principle of resonance to design a triangulation-based resonant beam positioning system (TRBPS) in the RF band. The proposed system employs phase-conjugation antenna arrays and resonance mechanism to achieve energy concentration and beam self-alignment, without requiring active signals from the target for positioning and complex beam control algorithms. Numerical evaluations indicate that TRBPS can achieve millimeter-level accuracy within a range of 3.6 m without the need for additional embedded systems.
Field of View Expansion for Resonant Beam Information and Power Transfer
Aug 08, 2024



Simultaneous wireless information and power transfer (SWIPT) leverages lightwave as the wireless transmission medium, emerging as a promising technology in the future Internet of Things (IoT) scenarios. The use of retro-reflectors in constructing spatially separated laser resonators (SSLR) enables a self-aligning wireless transmission system with the self-reproducing resonant beam, i.e. resonant beam system (RBS). However, it's effective Field of View (FoV) is physically limited by the size of retroreflectors and still requires significant improvement. This restricts the transmitter from providing seamless wireless connectivity and power supply to receivers within a large dynamic movement range. In this paper, we propose an FoV-enlarged resonant beam system operating at a meter distance by incorporating a telescope. The telescope plays a crucial role in minimizing the extra loss inflicted on the gain medium, which typically arises from the deviation of the resonant beam within the cavity. Further, we construct the proposed telescope-based RBS and experimentally demonstrate that the design could expand the FoV to 28$^\circ$ over 1 m transmission distance is about triple that of the ordinary RBS design.
Resonant Beam Enabled DoA Estimation in Passive Positioning System
Aug 08, 2024



The rapid advancement of the next generation of communications and internet of things (IoT) technologies has made the provision of location-based services for diverse devices an increasingly pressing necessity. Localizing devices with/without intelligent computing abilities, including both active and passive devices is essential, especially in indoor scenarios. For traditional RF positioning systems, aligning transmission signals and dealing with signal interference in complex environments are inevitable challenges. Therefore, this paper proposed a new passive positioning system, the RF-band resonant beam positioning system (RF-RBPS), which achieves energy concentration and beam alignment by amplifying echoes between the base station (BS) and the passive target (PT), without the need for complex channel estimation and time-consuming beamforming and provides high-precision direction of arrival (DoA) estimation for battery-free targets using the resonant mechanism. The direction information of the PT is estimated using the multiple signal classification (MUSIC) algorithm at the end of BS. The feasibility of the proposed system is validated through theoretical analysis and simulations. Results indicate that the proposed RF-RBPS surpasses RF-band active positioning system (RF-APS) in precision, achieving millimeter-level precision at 2m within an elevation angle of 35$^\circ$, and an error of less than 3cm at 2.5m within an elevation angle of 35$^\circ$.
Binocular Localization Using Resonant Beam
Dec 02, 2022



Locating mobile devices precisely in indoor scenarios is a challenging task because of the signal diffraction and reflection in complicated environments. One vital cause deteriorating the localization performance is the inevitable power dissipation along the propagation path of localization signals. In this paper, we propose a high-accuracy localization scheme based on the resonant beam system (RBS) and the binocular vision, i.e., binocular based resonant beam localization (BRBL). The BRBL system utilizes the energy-concentrated and self-aligned transmission of RBS to realize high-efficiency signal propagation and self-positioning for the target. The binocular method is combined with RBS to obtain the three-dimensional (3-D) coordinates of the target for the first time. To exhibit the localization mechanism, we first elaborate on the binocular localization model, including the resonant beam transmission analysis and the geometric derivation of the binocular method with RBS. Then, we establish the power model of RBS, and the signal and noise models of beam spot imaging, respectively, to analyse the performance of the BRBL system. Finally, the numerical results show an outstanding performance of centimeter level accuracy (i.e., $<5\mathrm{cm}$ in $0.4\mathrm{m}$ width and $0.4\mathrm{m}$ length effective range at $1\mathrm{m}$ vertical distance, $<13\mathrm{cm}$ in $0.6\mathrm{m}$ width and $0.6\mathrm{m}$ length effective range at $2\mathrm{m}$ vertical distance), which applies to indoor scenarios.