 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuick Question: Interrupting Users for Microtasks with Reinforcement Learning
Jul 18, 2020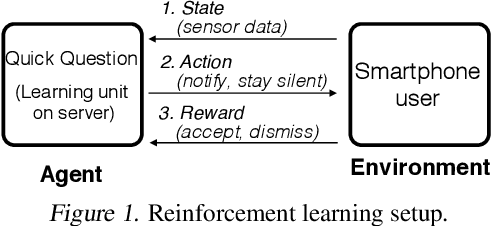
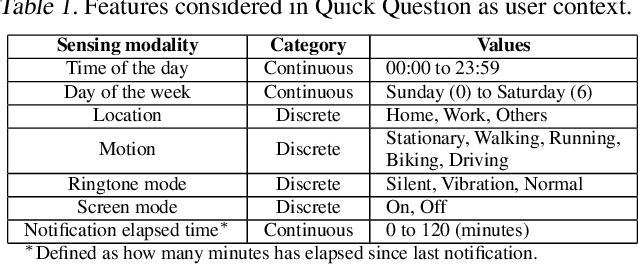
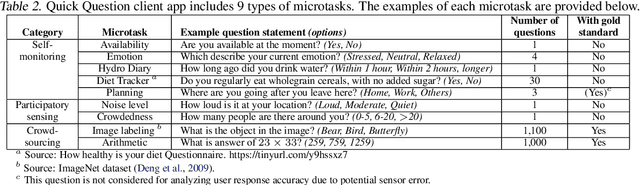
Human attention is a scarce resource in modern computing. A multitude of microtasks vie for user attention to crowdsource information, perform momentary assessments, personalize services, and execute actions with a single touch. A lot gets done when these tasks take up the invisible free moments of the day. However, an interruption at an inappropriate time degrades productivity and causes annoyance. Prior works have exploited contextual cues and behavioral data to identify interruptibility for microtasks with much success. With Quick Question, we explore use of reinforcement learning (RL) to schedule microtasks while minimizing user annoyance and compare its performance with supervised learning. We model the problem as a Markov decision process and use Advantage Actor Critic algorithm to identify interruptible moments based on context and history of user interactions. In our 5-week, 30-participant study, we compare the proposed RL algorithm against supervised learning methods. While the mean number of responses between both methods is commensurate, RL is more effective at avoiding dismissal of notifications and improves user experience over time.
Investment Ranking Challenge: Identifying the best performing stocks based on their semi-annual returns
Jun 20, 2019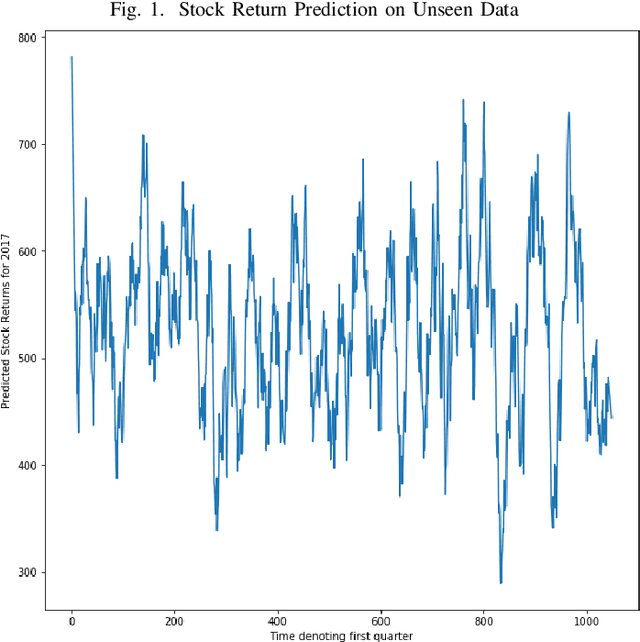
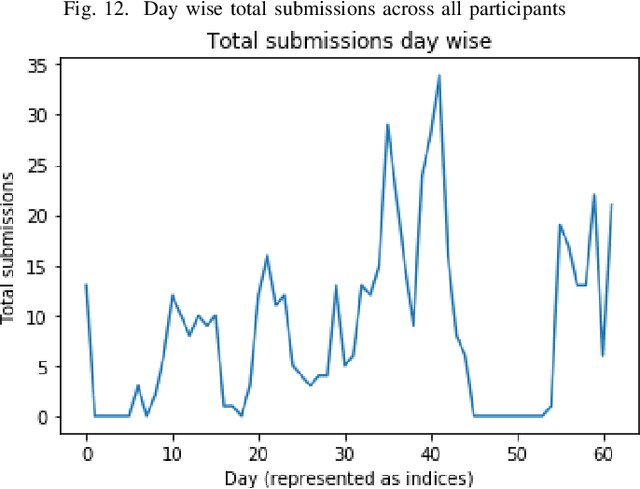
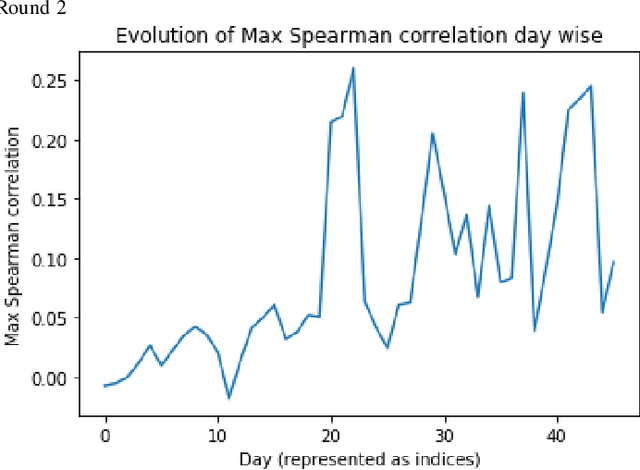
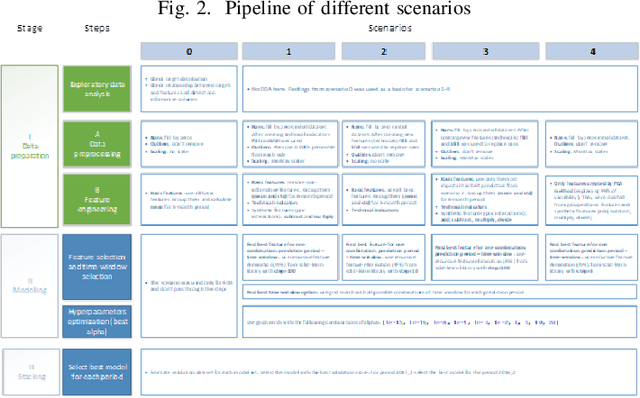
In the IEEE Investment ranking challenge 2018, participants were asked to build a model which would identify the best performing stocks based on their returns over a forward six months window. Anonymized financial predictors and semi-annual returns were provided for a group of anonymized stocks from 1996 to 2017, which were divided into 42 non-overlapping six months period. The second half of 2017 was used as an out-of-sample test of the model's performance. Metrics used were Spearman's Rank Correlation Coefficient and Normalized Discounted Cumulative Gain (NDCG) of the top 20% of a model's predicted rankings. The top six participants were invited to describe their approach. The solutions used were varied and were based on selecting a subset of data to train, combination of deep and shallow neural networks, different boosting algorithms, different models with different sets of features, linear support vector machine, combination of convoltional neural network (CNN) and Long short term memory (LSTM).
Learning to Take Good Pictures of People with a Robot Photographer
Apr 11, 2019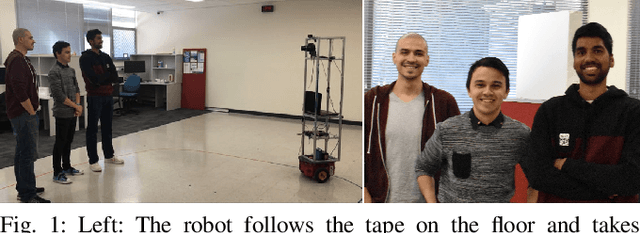
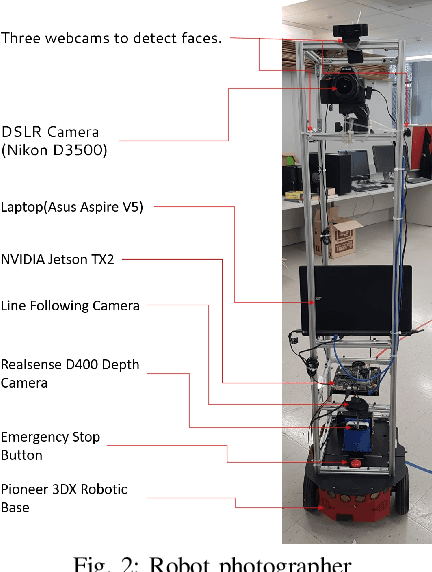
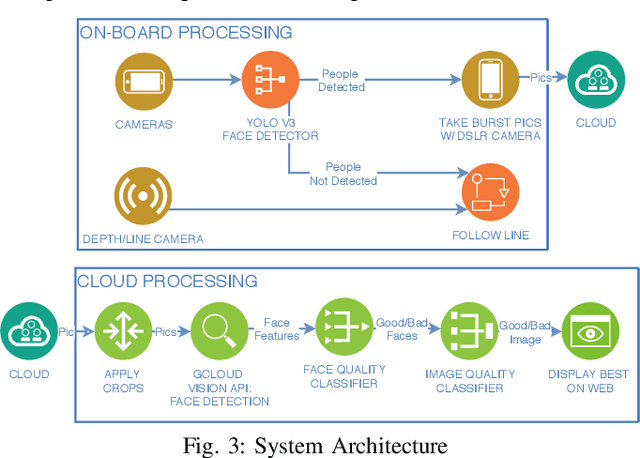
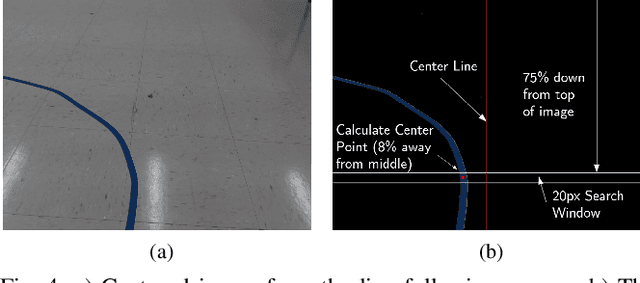
We present a robotic system capable of navigating autonomously by following a line and taking good quality pictures of people. When a group of people are detected, the robot rotates towards them and then back to line while continuously taking pictures from different angles. Each picture is processed in the cloud where its quality is estimated in a two-stage algorithm. First, features such as the face orientation and likelihood of facial emotions are input to a fully connected neural network to assign a quality score to each face. Second, a representation is extracted by abstracting faces from the image and it is input to a to Convolutional Neural Network (CNN) to classify the quality of the overall picture. We collected a dataset in which a picture was labeled as good quality if subjects are well-positioned in the image and oriented towards the camera with a pleasant expression. Our approach detected the quality of pictures with 78.4% accuracy in this dataset and received a better mean user rating (3.71/5) than a heuristic method that uses photographic composition procedures in a study where 97 human judges rated each picture. A statistical analysis against the state-of-the-art verified the quality of the resulting pictures.