 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNMPC trajectory planner for urban autonomous driving
May 09, 2021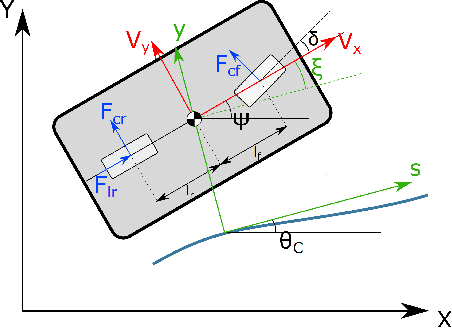
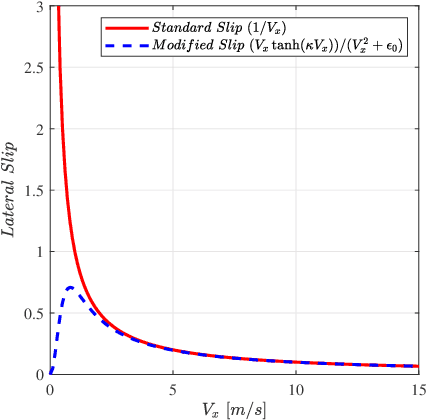
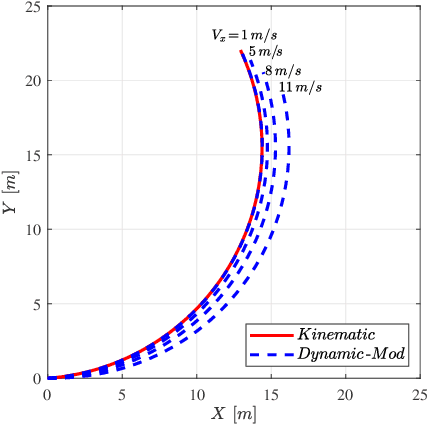
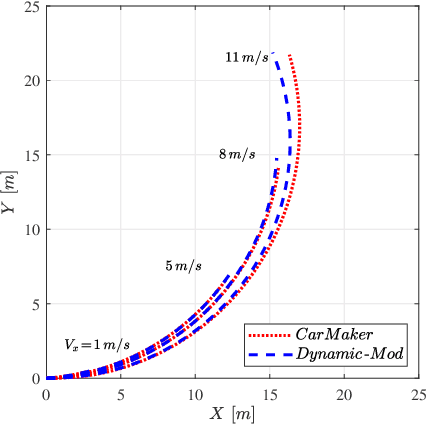
This paper presents a trajectory planner for autonomous driving based on a Nonlinear Model Predictive Control (NMPC) algorithm that accounts for Pacejka's nonlinear lateral tyre dynamics as well as for zero speed conditions through a novel slip angles calculation. In the NMPC framework, road boundaries and obstacles (both static and moving) are taken into account thanks to soft and hard constraints implementation. The numerical solution of the NMPC problem is carried out using ACADO toolkit coupled with the quadratic programming solver qpOASES. The effectiveness of the proposed NMPC trajectory planner has been tested using CarMaker multibody models. Time analysis results provided by the simulations shown, state that the proposed algorithm can be implemented on the real-time control framework of an autonomous vehicle under the assumption of data coming from an upstream estimation block.
LiDAR point-cloud processing based on projection methods: a comparison
Aug 03, 2020
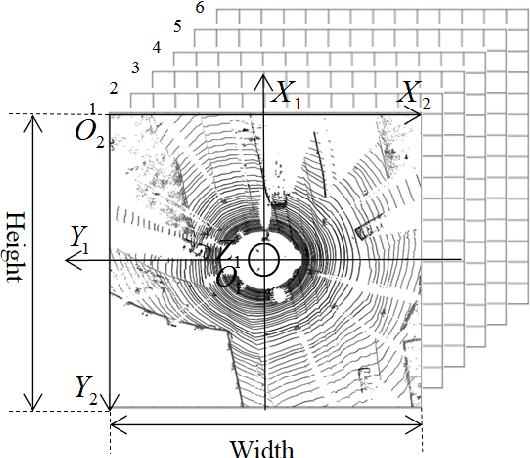
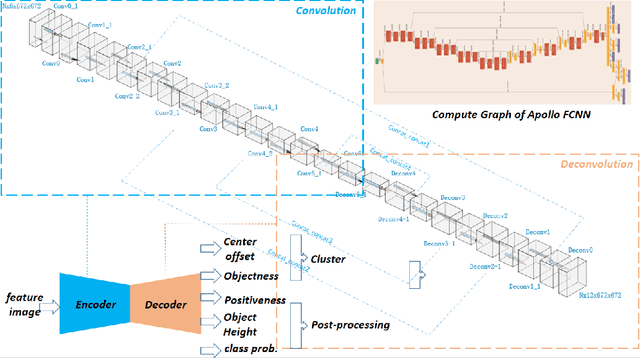
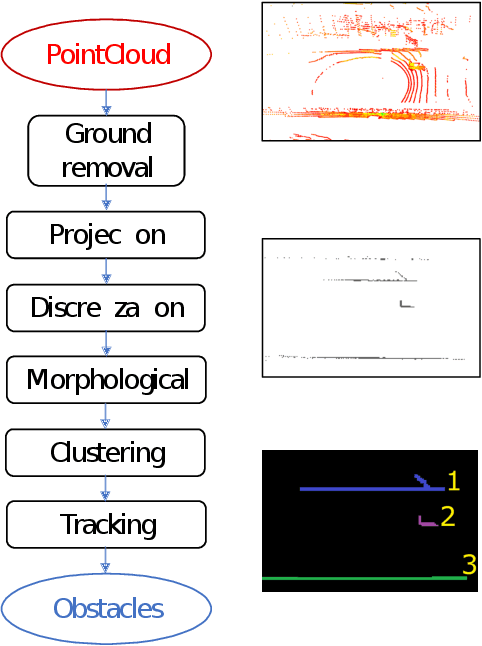
An accurate and rapid-response perception system is fundamental for autonomous vehicles to operate safely. 3D object detection methods handle point clouds given by LiDAR sensors to provide accurate depth and position information for each detection, together with its dimensions and classification. The information is then used to track vehicles and other obstacles in the surroundings of the autonomous vehicle, and also to feed control units that guarantee collision avoidance and motion planning. Nowadays, object detection systems can be divided into two main categories. The first ones are the geometric based, which retrieve the obstacles using geometric and morphological operations on the 3D points. The seconds are the deep learning-based, which process the 3D points, or an elaboration of the 3D point-cloud, with deep learning techniques to retrieve a set of obstacles. This paper presents a comparison between those two approaches, presenting one implementation of each class on a real autonomous vehicle. Accuracy of the estimates of the algorithms has been evaluated with experimental tests carried in the Monza ENI circuit. The position of the ego vehicle and the obstacle is given by GPS sensors with RTK correction, which guarantees an accurate ground truth for the comparison. Both algorithms have been implemented on ROS and run on a consumer laptop.
Advances in centerline estimation for autonomous lateral control
Feb 28, 2020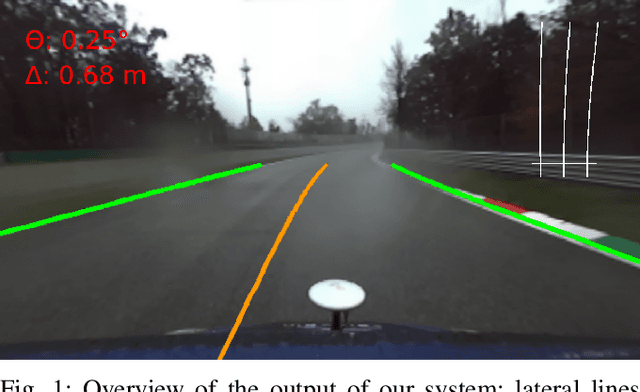
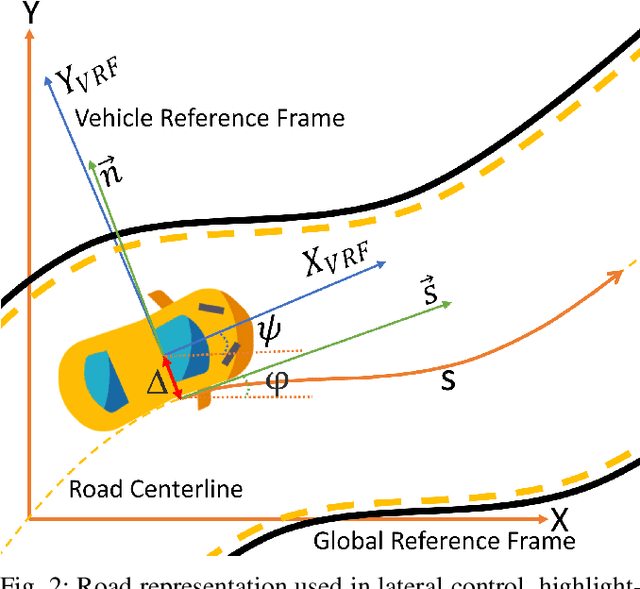
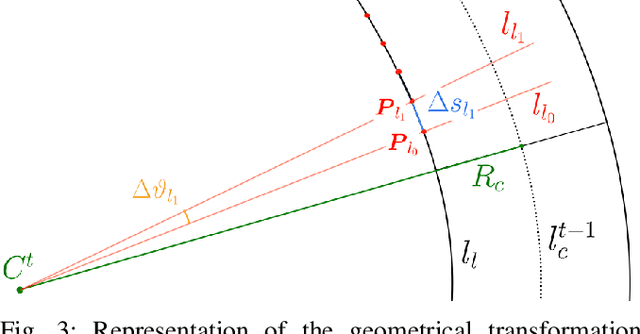
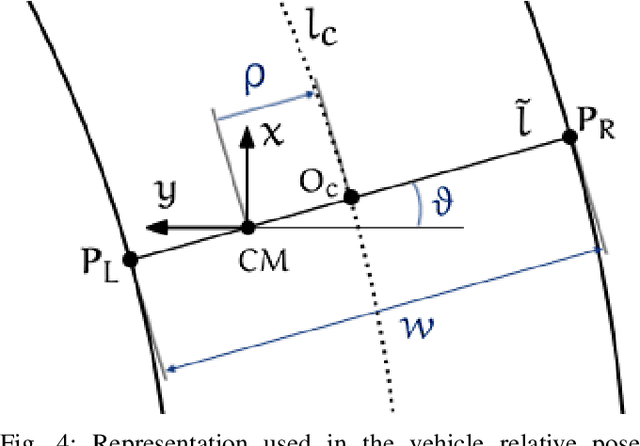
The ability of autonomous vehicles to maintain an accurate trajectory within their road lane is crucial for safe operation. This requires detecting the road lines and estimating the car relative pose within its lane. Lateral lines are usually computed from camera images. Still, most of the works on line detection are limited to image mask retrieval and do not provide a usable representation in world coordinates. What we propose in this paper is a complete perception pipeline able to retrieve, from a single image, all the information required by a vehicle lateral control system: road lines equation, centerline, vehicle heading and lateral displacement. We also evaluate our system by acquiring a new dataset with accurate geometric ground truth, and we make it publicly available to act as a benchmark for further research.