 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Digital Twin Landscape at the Crossroads of Predictive Maintenance, Machine Learning and Physics Based Modeling
Jun 23, 2022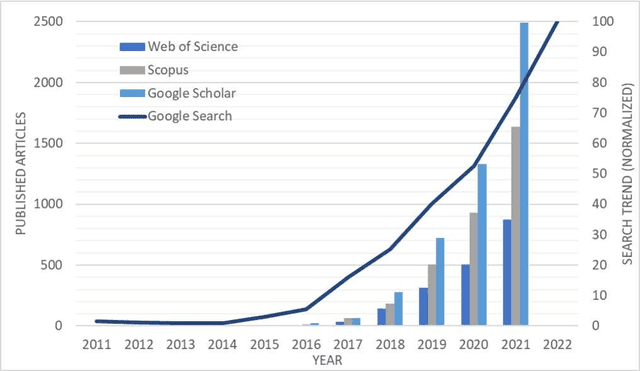

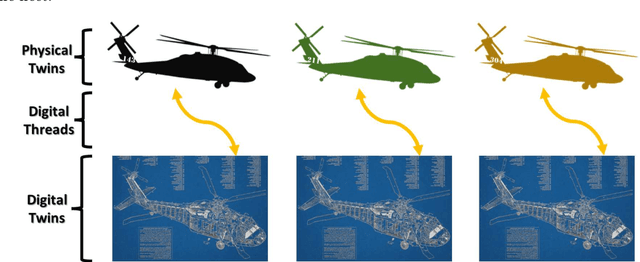
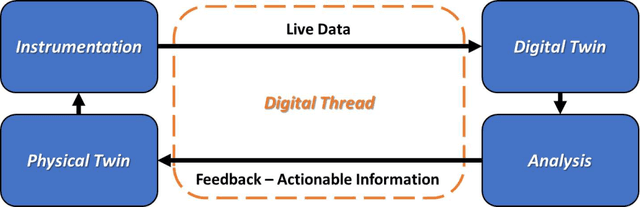
The concept of a digital twin has exploded in popularity over the past decade, yet confusion around its plurality of definitions, its novelty as a new technology, and its practical applicability still exists, all despite numerous reviews, surveys, and press releases. The history of the term digital twin is explored, as well as its initial context in the fields of product life cycle management, asset maintenance, and equipment fleet management, operations, and planning. A definition for a minimally viable framework to utilize a digital twin is also provided based on seven essential elements. A brief tour through DT applications and industries where DT methods are employed is also outlined. The application of a digital twin framework is highlighted in the field of predictive maintenance, and its extensions utilizing machine learning and physics based modeling. Employing the combination of machine learning and physics based modeling to form hybrid digital twin frameworks, may synergistically alleviate the shortcomings of each method when used in isolation. Key challenges of implementing digital twin models in practice are additionally discussed. As digital twin technology experiences rapid growth and as it matures, its great promise to substantially enhance tools and solutions for intelligent upkeep of complex equipment, are expected to materialize.
Enforcing Policy Feasibility Constraints through Differentiable Projection for Energy Optimization
May 19, 2021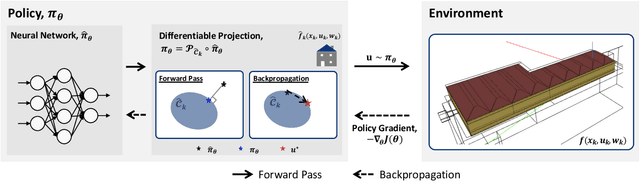
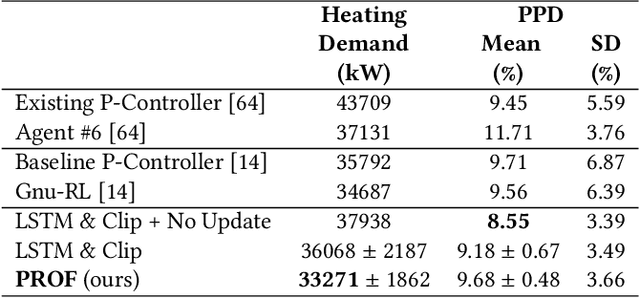


While reinforcement learning (RL) is gaining popularity in energy systems control, its real-world applications are limited due to the fact that the actions from learned policies may not satisfy functional requirements or be feasible for the underlying physical system. In this work, we propose PROjected Feasibility (PROF), a method to enforce convex operational constraints within neural policies. Specifically, we incorporate a differentiable projection layer within a neural network-based policy to enforce that all learned actions are feasible. We then update the policy end-to-end by propagating gradients through this differentiable projection layer, making the policy cognizant of the operational constraints. We demonstrate our method on two applications: energy-efficient building operation and inverter control. In the building operation setting, we show that PROF maintains thermal comfort requirements while improving energy efficiency by 4% over state-of-the-art methods. In the inverter control setting, PROF perfectly satisfies voltage constraints on the IEEE 37-bus feeder system, as it learns to curtail as little renewable energy as possible within its safety set.
Learning to Solve AC Optimal Power Flow by Differentiating through Holomorphic Embeddings
Dec 16, 2020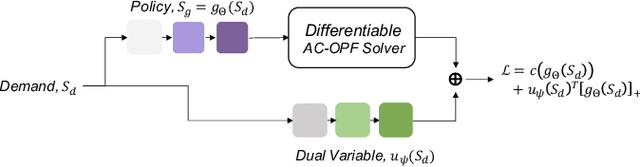
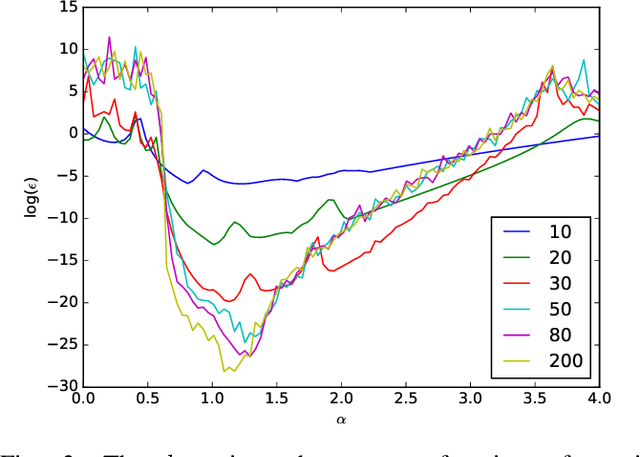
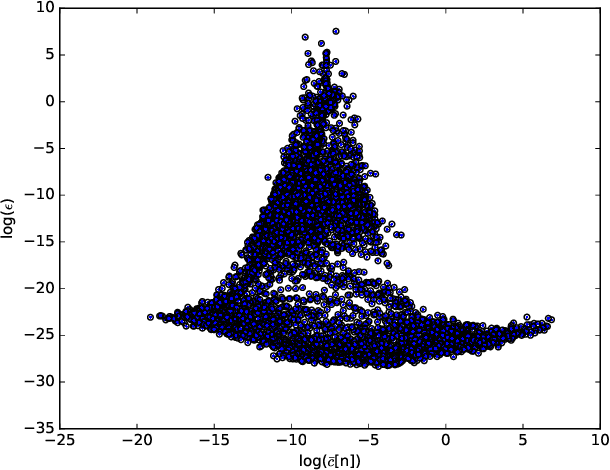

Alternating current optimal power flow (AC-OPF) is one of the fundamental problems in power systems operation. AC-OPF is traditionally cast as a constrained optimization problem that seeks optimal generation set points whilst fulfilling a set of non-linear equality constraints -- the power flow equations. With increasing penetration of renewable generation, grid operators need to solve larger problems at shorter intervals. This motivates the research interest in learning OPF solutions with neural networks, which have fast inference time and is potentially scalable to large networks. The main difficulty in solving the AC-OPF problem lies in dealing with this equality constraint that has spurious roots, i.e. there are assignments of voltages that fulfill the power flow equations that however are not physically realizable. This property renders any method relying on projected-gradients brittle because these non-physical roots can act as attractors. In this paper, we show efficient strategies that circumvent this problem by differentiating through the operations of a power flow solver that embeds the power flow equations into a holomorphic function. The resulting learning-based approach is validated experimentally on a 200-bus system and we show that, after training, the learned agent produces optimized power flow solutions reliably and fast. Specifically, we report a 12x increase in speed and a 40% increase in robustness compared to a traditional solver. To the best of our knowledge, this approach constitutes the first learning-based approach that successfully respects the full non-linear AC-OPF equations.
Damage-sensitive and domain-invariant feature extraction for vehicle-vibration-based bridge health monitoring
Feb 06, 2020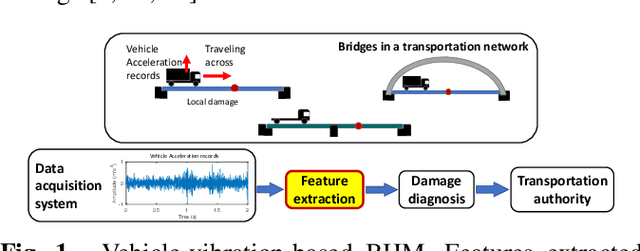
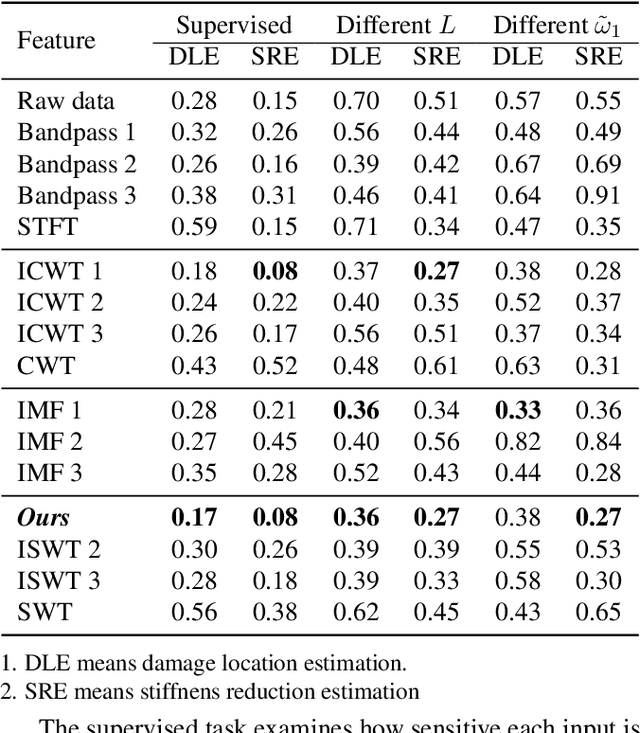
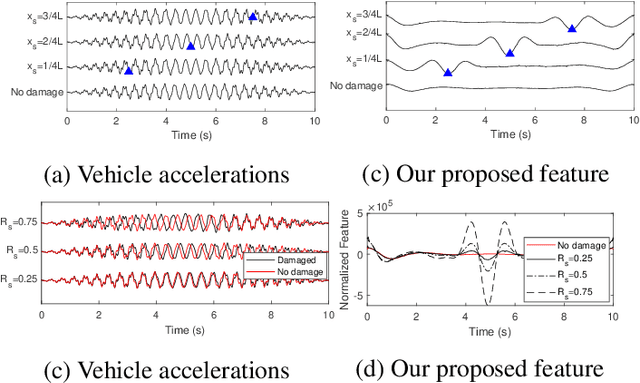
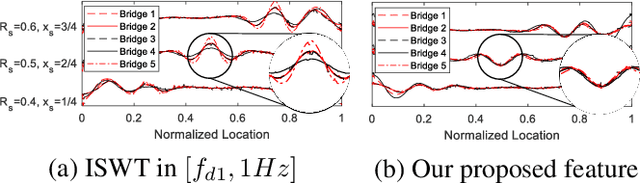
We introduce a physics-guided signal processing approach to extract a damage-sensitive and domain-invariant (DS & DI) feature from acceleration response data of a vehicle traveling over a bridge to assess bridge health. Motivated by indirect sensing methods' benefits, such as low-cost and low-maintenance, vehicle-vibration-based bridge health monitoring has been studied to efficiently monitor bridges in real-time. Yet applying this approach is challenging because 1) physics-based features extracted manually are generally not damage-sensitive, and 2) features from machine learning techniques are often not applicable to different bridges. Thus, we formulate a vehicle bridge interaction system model and find a physics-guided DS & DI feature, which can be extracted using the synchrosqueezed wavelet transform representing non-stationary signals as intrinsic-mode-type components. We validate the effectiveness of the proposed feature with simulated experiments. Compared to conventional time- and frequency-domain features, our feature provides the best damage quantification and localization results across different bridges in five of six experiments.