 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Emotion-Memory Link: Do Memorability Annotations Matter for Intelligent Systems?
Jul 18, 2025Humans have a selective memory, remembering relevant episodes and forgetting the less relevant information. Possessing awareness of event memorability for a user could help intelligent systems in more accurate user modelling, especially for such applications as meeting support systems, memory augmentation, and meeting summarisation. Emotion recognition has been widely studied, since emotions are thought to signal moments of high personal relevance to users. The emotional experience of situations and their memorability have traditionally been considered to be closely tied to one another: moments that are experienced as highly emotional are considered to also be highly memorable. This relationship suggests that emotional annotations could serve as proxies for memorability. However, existing emotion recognition systems rely heavily on third-party annotations, which may not accurately represent the first-person experience of emotional relevance and memorability. This is why, in this study, we empirically examine the relationship between perceived group emotions (Pleasure-Arousal) and group memorability in the context of conversational interactions. Our investigation involves continuous time-based annotations of both emotions and memorability in dynamic, unstructured group settings, approximating conditions of real-world conversational AI applications such as online meeting support systems. Our results show that the observed relationship between affect and memorability annotations cannot be reliably distinguished from what might be expected under random chance. We discuss the implications of this surprising finding for the development and applications of Affective Computing technology. In addition, we contextualise our findings in broader discourses in the Affective Computing and point out important targets for future research efforts.
Dynamics of Collective Group Affect: Group-level Annotations and the Multimodal Modeling of Convergence and Divergence
Sep 13, 2024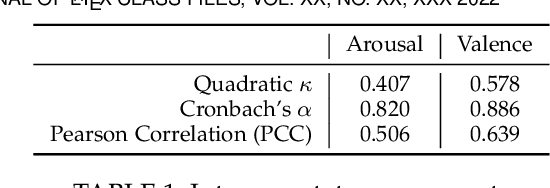
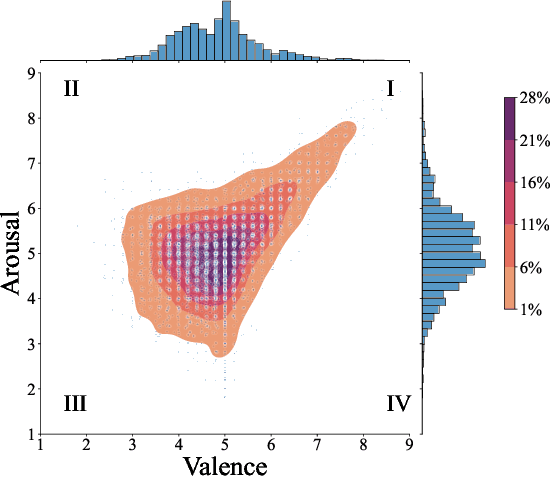
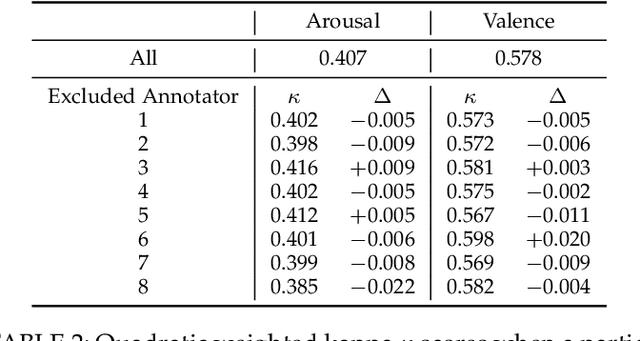

Collaborating in a group, whether face-to-face or virtually, involves continuously expressing emotions and interpreting those of other group members. Therefore, understanding group affect is essential to comprehending how groups interact and succeed in collaborative efforts. In this study, we move beyond individual-level affect and investigate group-level affect -- a collective phenomenon that reflects the shared mood or emotions among group members at a particular moment. As the first in literature, we gather annotations for group-level affective expressions using a fine-grained temporal approach (15 second windows) that also captures the inherent dynamics of the collective construct. To this end, we use trained annotators and an annotation procedure specifically tuned to capture the entire scope of the group interaction. In addition, we model group affect dynamics over time. One way to study the ebb and flow of group affect in group interactions is to model the underlying convergence (driven by emotional contagion) and divergence (resulting from emotional reactivity) of affective expressions amongst group members. To capture these interpersonal dynamics, we extract synchrony based features from both audio and visual social signal cues. An analysis of these features reveals that interacting groups tend to diverge in terms of their social signals along neutral levels of group affect, and converge along extreme levels of affect expression. We further present results on the predictive modeling of dynamic group affect which underscores the importance of using synchrony-based features in the modeling process, as well as the multimodal nature of group affect. We anticipate that the presented models will serve as the baselines of future research on the automatic recognition of dynamic group affect.
The world seems different in a social context: a neural network analysis of human experimental data
Mar 03, 2022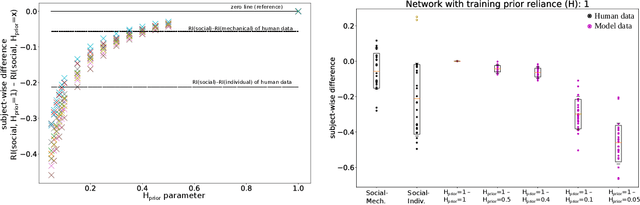
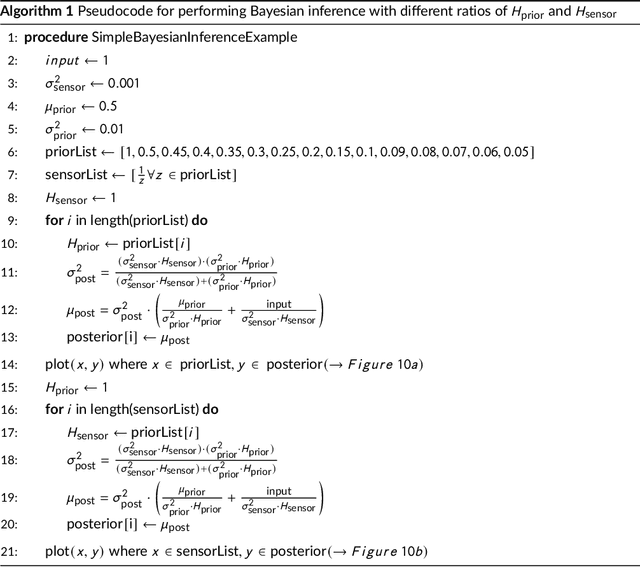
Human perception and behavior are affected by the situational context, in particular during social interactions. A recent study demonstrated that humans perceive visual stimuli differently depending on whether they do the task by themselves or together with a robot. Specifically, it was found that the central tendency effect is stronger in social than in non-social task settings. The particular nature of such behavioral changes induced by social interaction, and their underlying cognitive processes in the human brain are, however, still not well understood. In this paper, we address this question by training an artificial neural network inspired by the predictive coding theory on the above behavioral data set. Using this computational model, we investigate whether the change in behavior that was caused by the situational context in the human experiment could be explained by continuous modifications of a parameter expressing how strongly sensory and prior information affect perception. We demonstrate that it is possible to replicate human behavioral data in both individual and social task settings by modifying the precision of prior and sensory signals, indicating that social and non-social task settings might in fact exist on a continuum. At the same time an analysis of the neural activation traces of the trained networks provides evidence that information is coded in fundamentally different ways in the network in the individual and in the social conditions. Our results emphasize the importance of computational replications of behavioral data for generating hypotheses on the underlying cognitive mechanisms of shared perception and may provide inspiration for follow-up studies in the field of neuroscience.
Towards a Real-time Measure of the Perception of Anthropomorphism in Human-robot Interaction
Jan 24, 2022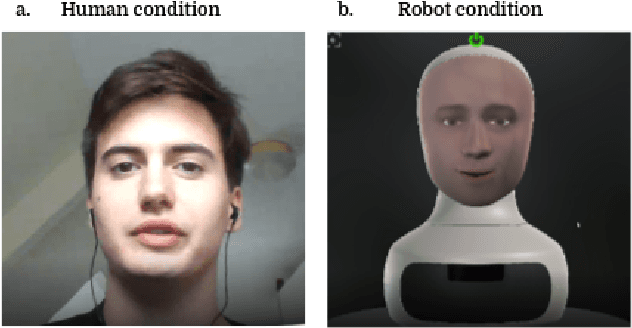
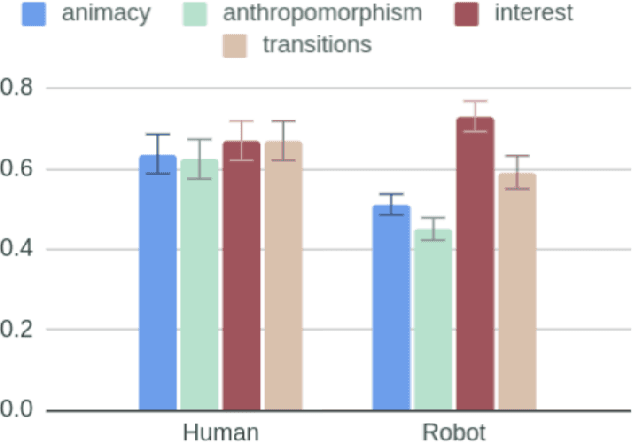
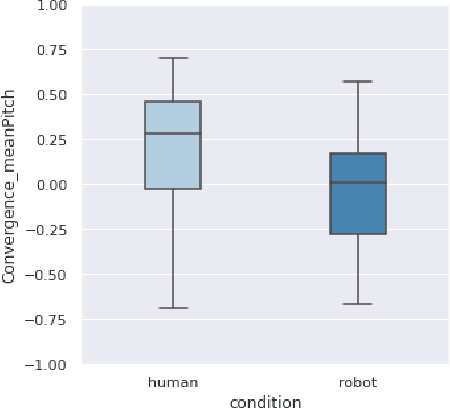
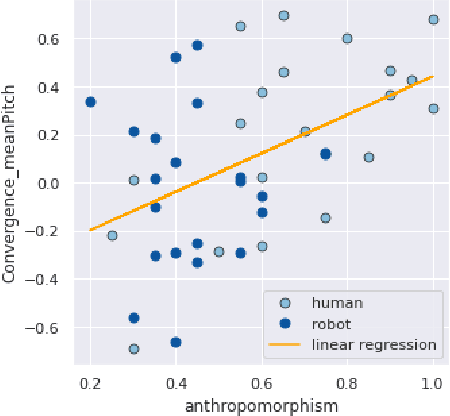
How human-like do conversational robots need to look to enable long-term human-robot conversation? One essential aspect of long-term interaction is a human's ability to adapt to the varying degrees of a conversational partner's engagement and emotions. Prosodically, this can be achieved through (dis)entrainment. While speech-synthesis has been a limiting factor for many years, restrictions in this regard are increasingly mitigated. These advancements now emphasise the importance of studying the effect of robot embodiment on human entrainment. In this study, we conducted a between-subjects online human-robot interaction experiment in an educational use-case scenario where a tutor was either embodied through a human or a robot face. 43 English-speaking participants took part in the study for whom we analysed the degree of acoustic-prosodic entrainment to the human or robot face, respectively. We found that the degree of subjective and objective perception of anthropomorphism positively correlates with acoustic-prosodic entrainment.