 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Dynamic Rebalancing in Dockless Bike-Sharing Systems via Deep Reinforcement Learning
May 14, 2026This paper proposes a fully dynamic Deep Reinforcement Learning (DRL) method for rebalancing dockless bike-sharing systems, overcoming the limitations of periodic, system-wide interventions. We model the service through a graph-based simulator and cast rebalancing as a Markov decision process. A DRL agent routes a single truck in real time, executing localized pick-up, drop-off, and charging actions guided by spatiotemporal criticality scores. Experiments on real-world data show significant reductions in availability failures with a minimal fleet size, while limiting spatial inequality and mobility deserts. Our approach demonstrates the value of learning-based rebalancing for efficient and reliable shared micromobility.
Towards Scalable IoT Deployment for Visual Anomaly Detection via Efficient Compression
May 15, 2025Visual Anomaly Detection (VAD) is a key task in industrial settings, where minimizing operational costs is essential. Deploying deep learning models within Internet of Things (IoT) environments introduces specific challenges due to limited computational power and bandwidth of edge devices. This study investigates how to perform VAD effectively under such constraints by leveraging compact, efficient processing strategies. We evaluate several data compression techniques, examining the tradeoff between system latency and detection accuracy. Experiments on the MVTec AD benchmark demonstrate that significant compression can be achieved with minimal loss in anomaly detection performance compared to uncompressed data. Current results show up to 80% reduction in end-to-end inference time, including edge processing, transmission, and server computation.
A Distributed Approach to Autonomous Intersection Management via Multi-Agent Reinforcement Learning
May 14, 2024



Autonomous intersection management (AIM) poses significant challenges due to the intricate nature of real-world traffic scenarios and the need for a highly expensive centralised server in charge of simultaneously controlling all the vehicles. This study addresses such issues by proposing a novel distributed approach to AIM utilizing multi-agent reinforcement learning (MARL). We show that by leveraging the 3D surround view technology for advanced assistance systems, autonomous vehicles can accurately navigate intersection scenarios without needing any centralised controller. The contributions of this paper thus include a MARL-based algorithm for the autonomous management of a 4-way intersection and also the introduction of a new strategy called prioritised scenario replay for improved training efficacy. We validate our approach as an innovative alternative to conventional centralised AIM techniques, ensuring the full reproducibility of our results. Specifically, experiments conducted in virtual environments using the SMARTS platform highlight its superiority over benchmarks across various metrics.
A Fairness-Oriented Reinforcement Learning Approach for the Operation and Control of Shared Micromobility Services
Mar 23, 2024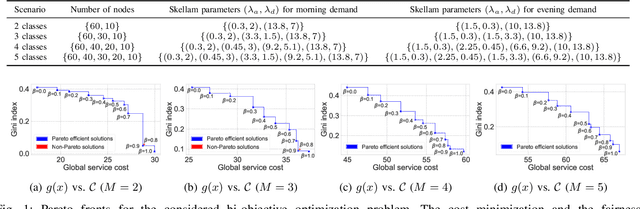
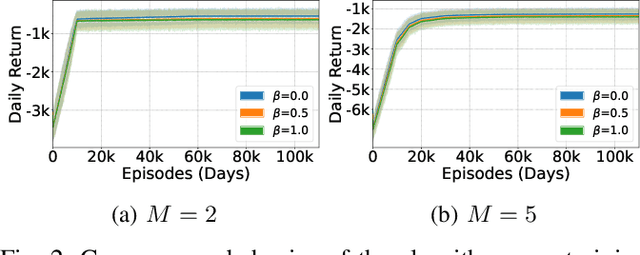

As Machine Learning systems become increasingly popular across diverse application domains, including those with direct human implications, the imperative of equity and algorithmic fairness has risen to prominence in the Artificial Intelligence community. On the other hand, in the context of Shared Micromobility Systems, the exploration of fairness-oriented approaches remains limited. Addressing this gap, we introduce a pioneering investigation into the balance between performance optimization and algorithmic fairness in the operation and control of Shared Micromobility Services. Our study leverages the Q-Learning algorithm in Reinforcement Learning, benefiting from its convergence guarantees to ensure the robustness of our proposed approach. Notably, our methodology stands out for its ability to achieve equitable outcomes, as measured by the Gini index, across different station categories--central, peripheral, and remote. Through strategic rebalancing of vehicle distribution, our approach aims to maximize operator performance while simultaneously upholding fairness principles for users. In addition to theoretical insights, we substantiate our findings with a case study or simulation based on synthetic data, validating the efficacy of our approach. This paper underscores the critical importance of fairness considerations in shaping control strategies for Shared Micromobility Services, offering a pragmatic framework for enhancing equity in urban transportation systems.
Visual Sensor Network Stimulation Model Identification via Gaussian Mixture Model and Deep Embedded Features
Jan 18, 2022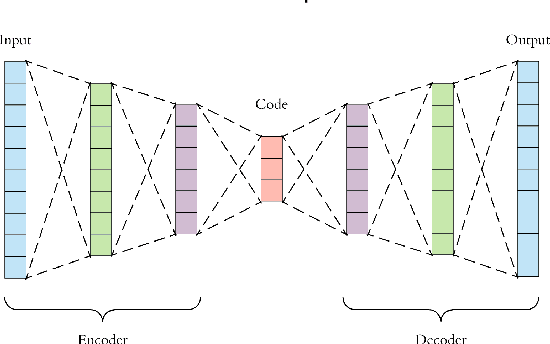
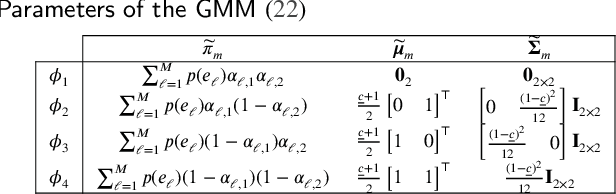
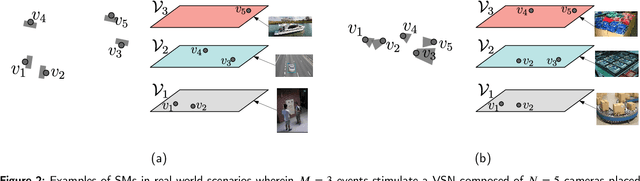
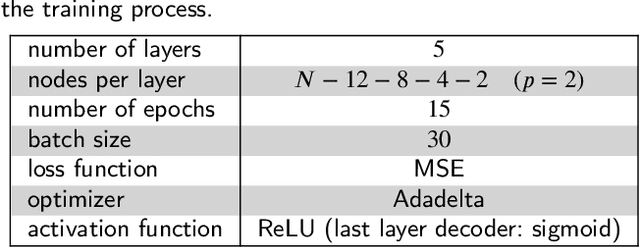
Visual sensor networks constitute a fundamental class of distributed sensing systems, with unique complexity and performance research subjects. One of these novel challenges is represented by the identification of the network stimulation model (SM), which emerges when a set of detectable events trigger different subsets of the cameras. In this direction, the formulation of the related SM identification problem is proposed, along with a proper network observations generation method. Consequently, an approach based on deep embedded features and soft clustering is leveraged to solve the presented identification problem. In detail, the Gaussian Mixture Modeling is employed to provide a suitable description for data distribution and an autoencoder is used to reduce undesired effects due to the so-called curse of dimensionality. Hence, it is shown that a SM can be learnt by solving Maximum A-Posteriori estimation on the encoded features belonging to a space with lower dimensionality. Lastly, numerical results are reported to validate the devised estimation algorithm.