 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Sensor Network Stimulation Model Identification via Gaussian Mixture Model and Deep Embedded Features
Jan 18, 2022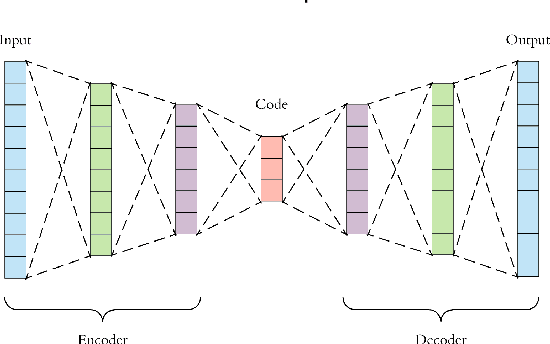
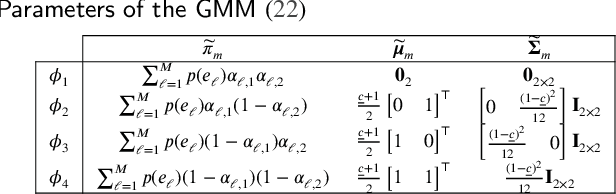
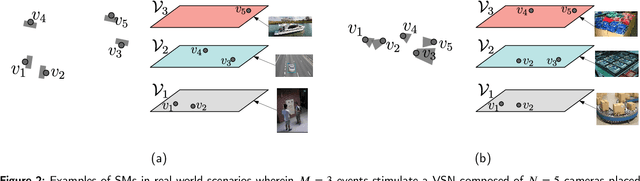
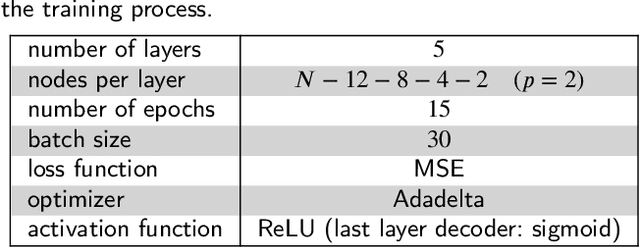
Visual sensor networks constitute a fundamental class of distributed sensing systems, with unique complexity and performance research subjects. One of these novel challenges is represented by the identification of the network stimulation model (SM), which emerges when a set of detectable events trigger different subsets of the cameras. In this direction, the formulation of the related SM identification problem is proposed, along with a proper network observations generation method. Consequently, an approach based on deep embedded features and soft clustering is leveraged to solve the presented identification problem. In detail, the Gaussian Mixture Modeling is employed to provide a suitable description for data distribution and an autoencoder is used to reduce undesired effects due to the so-called curse of dimensionality. Hence, it is shown that a SM can be learnt by solving Maximum A-Posteriori estimation on the encoded features belonging to a space with lower dimensionality. Lastly, numerical results are reported to validate the devised estimation algorithm.
Active Sensing for Search and Tracking: A Review
Dec 04, 2021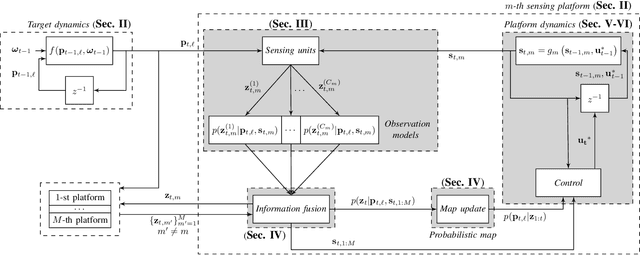
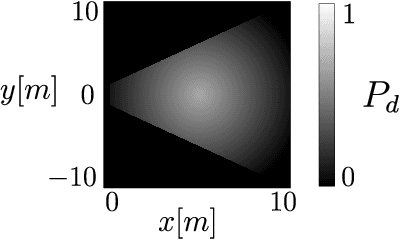
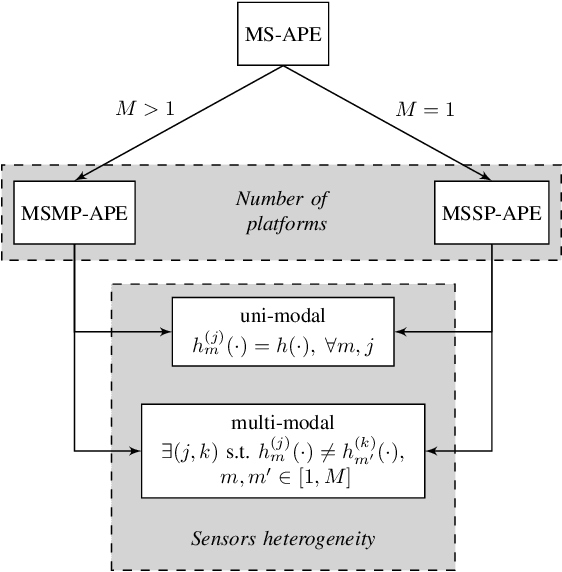
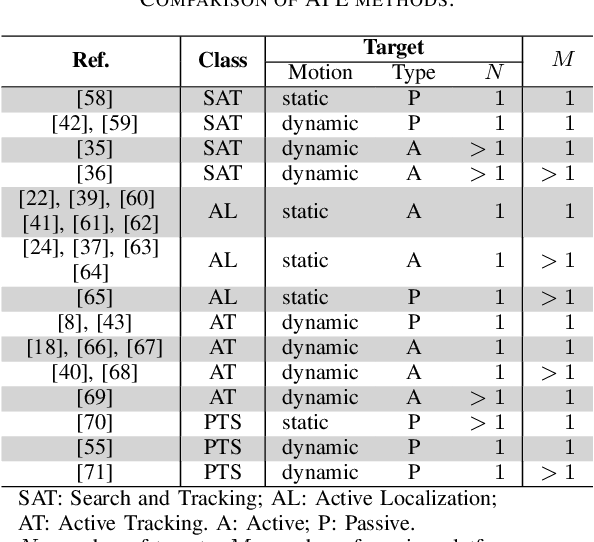
Active Position Estimation (APE) is the task of localizing one or more targets using one or more sensing platforms. APE is a key task for search and rescue missions, wildlife monitoring, source term estimation, and collaborative mobile robotics. Success in APE depends on the level of cooperation of the sensing platforms, their number, their degrees of freedom and the quality of the information gathered. APE control laws enable active sensing by satisfying either pure-exploitative or pure-explorative criteria. The former minimizes the uncertainty on position estimation; whereas the latter drives the platform closer to its task completion. In this paper, we define the main elements of APE to systematically classify and critically discuss the state of the art in this domain. We also propose a reference framework as a formalism to classify APE-related solutions. Overall, this survey explores the principal challenges and envisages the main research directions in the field of autonomous perception systems for localization tasks. It is also beneficial to promote the development of robust active sensing methods for search and tracking applications.
Online and Adaptive Parking Availability Mapping: An Uncertainty-Aware Active Sensing Approach for Connected Vehicles
May 01, 2021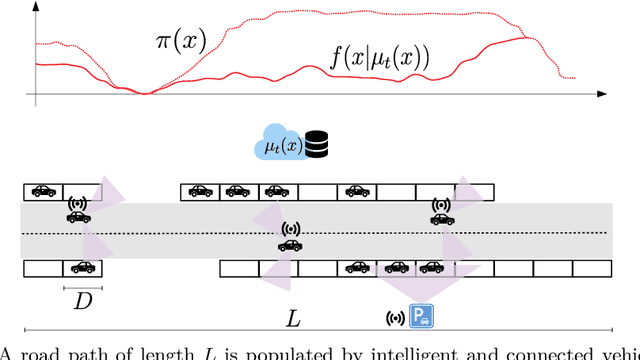
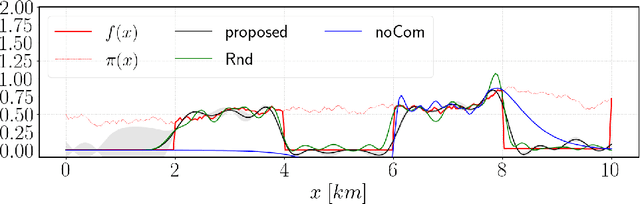
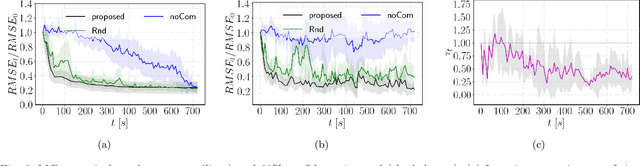
Research on connected vehicles represents a continuously evolving technological domain, fostered by the emerging Internet of Things (IoT) paradigm and the recent advances in intelligent transportation systems. Nowadays, vehicles are platforms capable of generating, receiving and automatically act based on large amount of data. In the context of assisted driving, connected vehicle technology provides real-time information about the surrounding traffic conditions. Such information is expected to improve drivers' quality of life, for example, by adopting decision making strategies according to the current parking availability status. In this context, we propose an online and adaptive scheme for parking availability mapping. Specifically, we adopt an information-seeking active sensing approach to select the incoming data, thus preserving the onboard storage and processing resources; then, we estimate the parking availability through Gaussian Process Regression. We compare the proposed algorithm with several baselines, which attain inferior performance in terms of mapping convergence speed and adaptivity capabilities; moreover, the proposed approach comes at the cost of a very small computational demand.
Transmitter Discovery through Radio-Visual Probabilistic Active Sensing
Mar 27, 2021



Multi-modal Probabilistic Active Sensing (MMPAS) uses sensor fusion and probabilistic models to control the perception process of robotic sensing platforms. MMPAS is successfully employed in environmental exploration, collaborative mobile robotics, and target tracking, being fostered by the high performance guarantees on autonomous perception. In this context, we propose a bi-Radio-Visual PAS scheme to solve the transmitter discovery problem. Specifically, we firstly exploit the correlation between radio and visual measurements to learn a target detection model in a self-supervised manner. Then, the model is combined with antenna radiation anisotropies into a Bayesian Optimization framework that controls the platform. We show that the proposed algorithm attains an accuracy of 92%, overcoming two other probabilistic active sensing baselines.
Probabilistic RF-Assisted Camera Wake-Up through Self-Supervised Gaussian Process Regression
Jan 30, 2021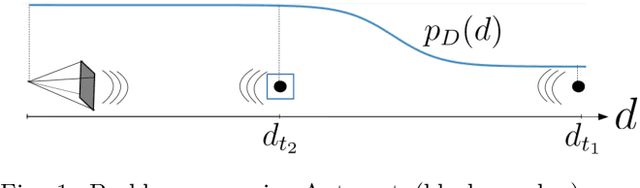



Research on wireless sensors represents a continuously evolving technological domain thanks to their high potentialities: flexibility and scalability, fast and economical deployment, pervasiveness in industrial, civil and domestic contexts. However,the maintenance costs and the sensors reliability are strongly affected by the battery lifetime, which may limit their use and exploitation. In this paper we consider a scenario in which a wireless smart camera, equipped with a low-energy radio receiver, is used to visually detect a moving radio-emitting target. To preserve the camera lifetime, we design a probabilistic energy-aware controller that regulates the camera state. The radio signal strength at the receiver side is used to predict the target detectability, via self-supervised Gaussian Process Regression combined with Recursive Bayesian Estimation. Both numerical and experimental results validate the proposed approach in terms of target detection accuracy and energy consumption.