 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStar-shaped Tilted Hexarotor Maneuverability: Analysis of the Role of the Tilt Cant Angles
Aug 22, 2024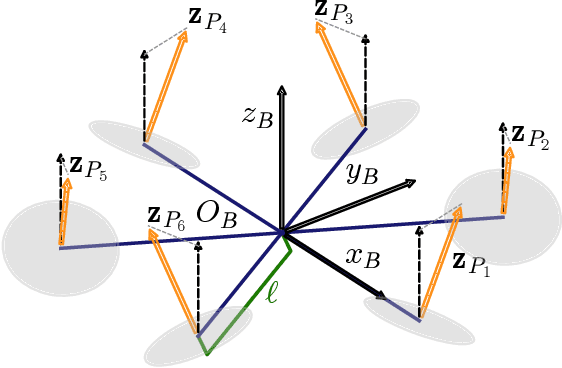
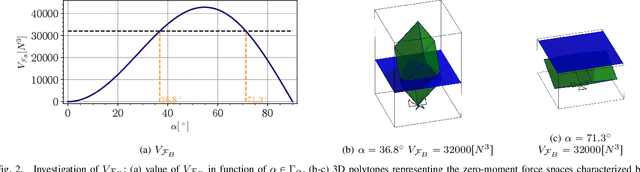
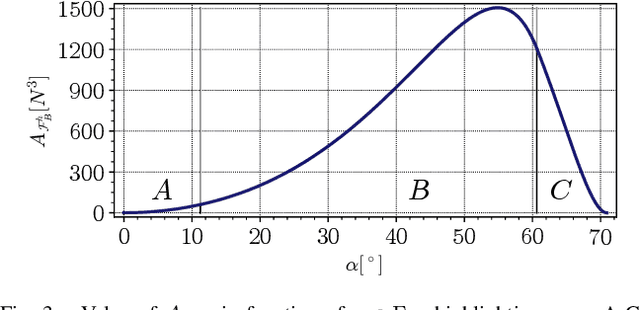
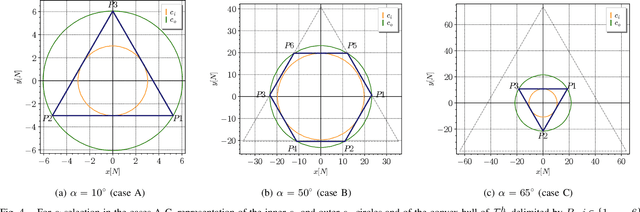
Star-shaped Tilted Hexarotors are rapidly emerging for applications highly demanding in terms of robustness and maneuverability. To ensure improvement in such features, a careful selection of the tilt angles is mandatory. In this work, we present a rigorous analysis of how the force subspace varies with the tilt cant angles, namely the tilt angles along the vehicle arms, taking into account gravity compensation and torque decoupling to abide by the hovering condition. Novel metrics are introduced to assess the performance of existing tilted platforms, as well as to provide some guidelines for the selection of the tilt cant angle in the design phase.
Tag-based Visual Odometry Estimation for Indoor UAVs Localization
Sep 23, 2023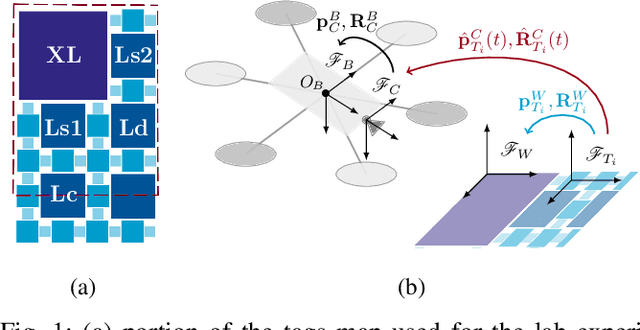
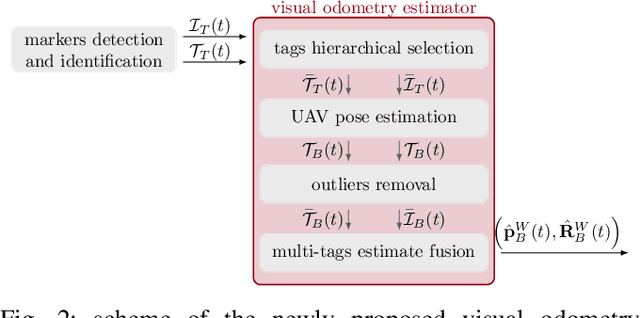
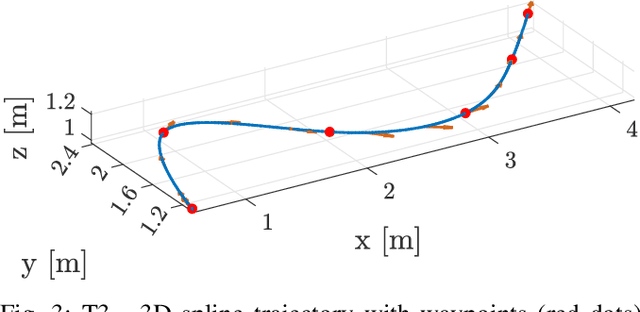
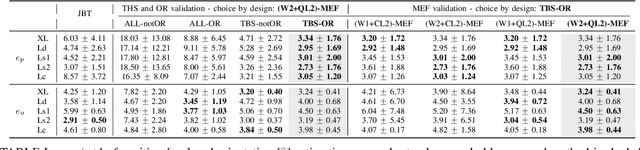
The agility and versatility offered by UAV platforms still encounter obstacles for full exploitation in industrial applications due to their indoor usage limitations. A significant challenge in this sense is finding a reliable and cost-effective way to localize aerial vehicles in a GNSS-denied environment. In this paper, we focus on the visual-based positioning paradigm: high accuracy in UAVs position and orientation estimation is achieved by leveraging the potentials offered by a dense and size-heterogenous map of tags. In detail, we propose an efficient visual odometry procedure focusing on hierarchical tags selection, outliers removal, and multi-tag estimation fusion, to facilitate the visual-inertial reconciliation. Experimental results show the validity of the proposed localization architecture as compared to the state of the art.
Visual Sensor Network Stimulation Model Identification via Gaussian Mixture Model and Deep Embedded Features
Jan 18, 2022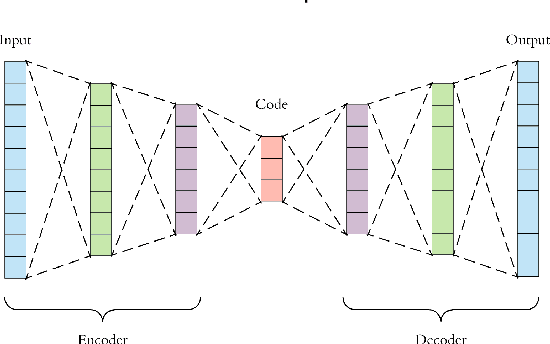
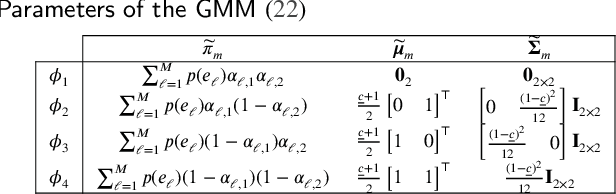
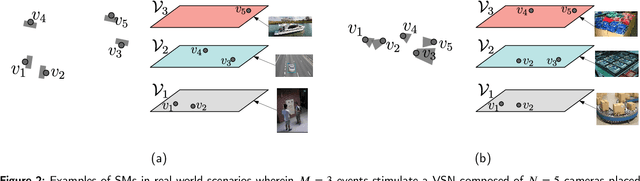
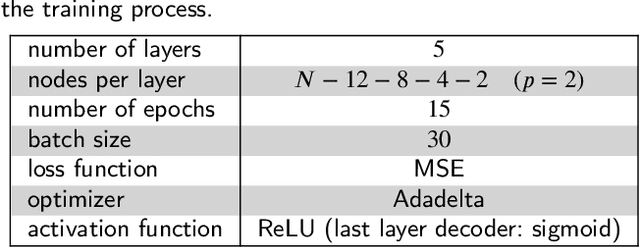
Visual sensor networks constitute a fundamental class of distributed sensing systems, with unique complexity and performance research subjects. One of these novel challenges is represented by the identification of the network stimulation model (SM), which emerges when a set of detectable events trigger different subsets of the cameras. In this direction, the formulation of the related SM identification problem is proposed, along with a proper network observations generation method. Consequently, an approach based on deep embedded features and soft clustering is leveraged to solve the presented identification problem. In detail, the Gaussian Mixture Modeling is employed to provide a suitable description for data distribution and an autoencoder is used to reduce undesired effects due to the so-called curse of dimensionality. Hence, it is shown that a SM can be learnt by solving Maximum A-Posteriori estimation on the encoded features belonging to a space with lower dimensionality. Lastly, numerical results are reported to validate the devised estimation algorithm.