 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Data-driven Anomaly Detection in Industrial Processes with ExIFFI
May 02, 2024



Anomaly detection (AD) is a crucial process often required in industrial settings. Anomalies can signal underlying issues within a system, prompting further investigation. Industrial processes aim to streamline operations as much as possible, encompassing the production of the final product, making AD an essential mean to reach this goal.Conventional anomaly detection methodologies typically classify observations as either normal or anomalous without providing insight into the reasons behind these classifications.Consequently, in light of the emergence of Industry 5.0, a more desirable approach involves providing interpretable outcomes, enabling users to understand the rationale behind the results.This paper presents the first industrial application of ExIFFI, a recently developed approach focused on the production of fast and efficient explanations for the Extended Isolation Forest (EIF) Anomaly detection method. ExIFFI is tested on two publicly available industrial datasets demonstrating superior effectiveness in explanations and computational efficiency with the respect to other state-of-the-art explainable AD models.
Tag-based Visual Odometry Estimation for Indoor UAVs Localization
Sep 23, 2023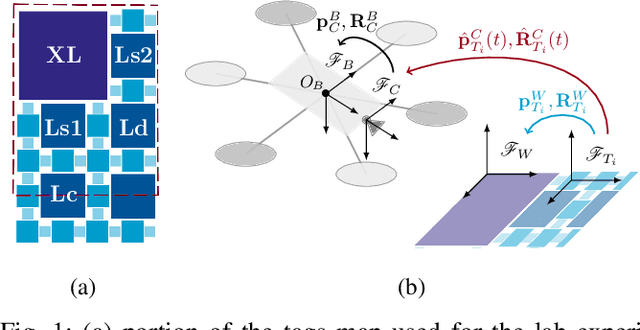
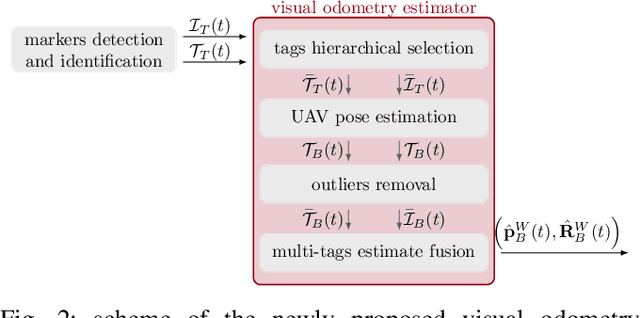
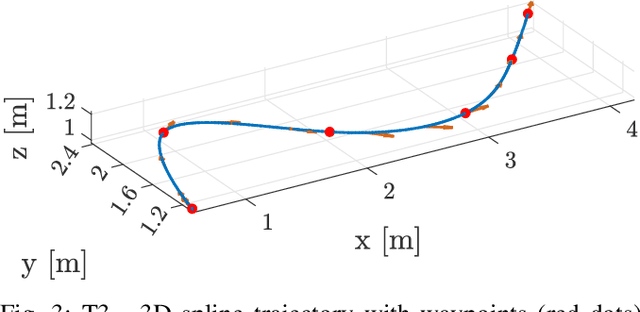
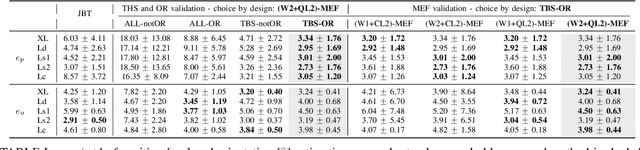
The agility and versatility offered by UAV platforms still encounter obstacles for full exploitation in industrial applications due to their indoor usage limitations. A significant challenge in this sense is finding a reliable and cost-effective way to localize aerial vehicles in a GNSS-denied environment. In this paper, we focus on the visual-based positioning paradigm: high accuracy in UAVs position and orientation estimation is achieved by leveraging the potentials offered by a dense and size-heterogenous map of tags. In detail, we propose an efficient visual odometry procedure focusing on hierarchical tags selection, outliers removal, and multi-tag estimation fusion, to facilitate the visual-inertial reconciliation. Experimental results show the validity of the proposed localization architecture as compared to the state of the art.