 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTag-based Visual Odometry Estimation for Indoor UAVs Localization
Sep 23, 2023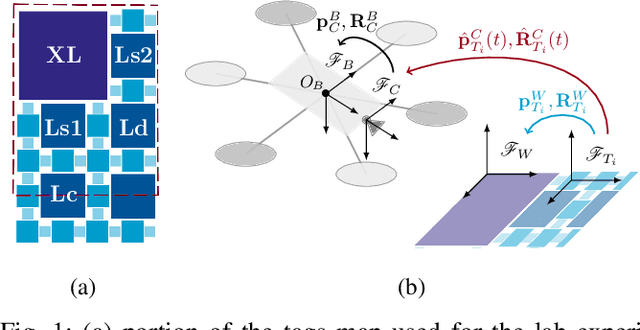
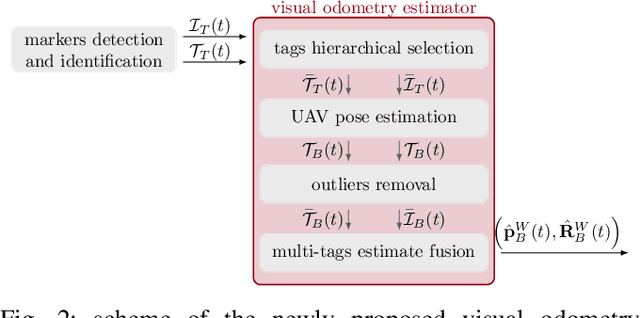
The agility and versatility offered by UAV platforms still encounter obstacles for full exploitation in industrial applications due to their indoor usage limitations. A significant challenge in this sense is finding a reliable and cost-effective way to localize aerial vehicles in a GNSS-denied environment. In this paper, we focus on the visual-based positioning paradigm: high accuracy in UAVs position and orientation estimation is achieved by leveraging the potentials offered by a dense and size-heterogenous map of tags. In detail, we propose an efficient visual odometry procedure focusing on hierarchical tags selection, outliers removal, and multi-tag estimation fusion, to facilitate the visual-inertial reconciliation. Experimental results show the validity of the proposed localization architecture as compared to the state of the art.