 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Geometric Inductive Bias for Object Centric Dynamics
Dec 17, 2025Equivariance is a powerful prior for learning physical dynamics, yet exact group equivariance can degrade performance if the symmetries are broken. We propose object-centric world models built with geometric algebra neural networks, providing a soft geometric inductive bias. Our models are evaluated using simulated environments of 2d rigid body dynamics with static obstacles, where we train for next-step predictions autoregressively. For long-horizon rollouts we show that the soft inductive bias of our models results in better performance in terms of physical fidelity compared to non-equivariant baseline models. The approach complements recent soft-equivariance ideas and aligns with the view that simple, well-chosen priors can yield robust generalization. These results suggest that geometric algebra offers an effective middle ground between hand-crafted physics and unstructured deep nets, delivering sample-efficient dynamics models for multi-object scenes.
AXIOM: Learning to Play Games in Minutes with Expanding Object-Centric Models
May 30, 2025Current deep reinforcement learning (DRL) approaches achieve state-of-the-art performance in various domains, but struggle with data efficiency compared to human learning, which leverages core priors about objects and their interactions. Active inference offers a principled framework for integrating sensory information with prior knowledge to learn a world model and quantify the uncertainty of its own beliefs and predictions. However, active inference models are usually crafted for a single task with bespoke knowledge, so they lack the domain flexibility typical of DRL approaches. To bridge this gap, we propose a novel architecture that integrates a minimal yet expressive set of core priors about object-centric dynamics and interactions to accelerate learning in low-data regimes. The resulting approach, which we call AXIOM, combines the usual data efficiency and interpretability of Bayesian approaches with the across-task generalization usually associated with DRL. AXIOM represents scenes as compositions of objects, whose dynamics are modeled as piecewise linear trajectories that capture sparse object-object interactions. The structure of the generative model is expanded online by growing and learning mixture models from single events and periodically refined through Bayesian model reduction to induce generalization. AXIOM masters various games within only 10,000 interaction steps, with both a small number of parameters compared to DRL, and without the computational expense of gradient-based optimization.
AutoBayes: A Compositional Framework for Generalized Variational Inference
Mar 25, 2025We introduce a new compositional framework for generalized variational inference, clarifying the different parts of a model, how they interact, and how they compose. We explain that both exact Bayesian inference and the loss functions typical of variational inference (such as variational free energy and its generalizations) satisfy chain rules akin to that of reverse-mode automatic differentiation, and we advocate for exploiting this to build and optimize models accordingly. To this end, we construct a series of compositional tools: for building models; for constructing their inversions; for attaching local loss functions; and for exposing parameters. Finally, we explain how the resulting parameterized statistical games may be optimized locally, too. We illustrate our framework with a number of classic examples, pointing to new areas of extensibility that are revealed.
Star-shaped Tilted Hexarotor Maneuverability: Analysis of the Role of the Tilt Cant Angles
Aug 22, 2024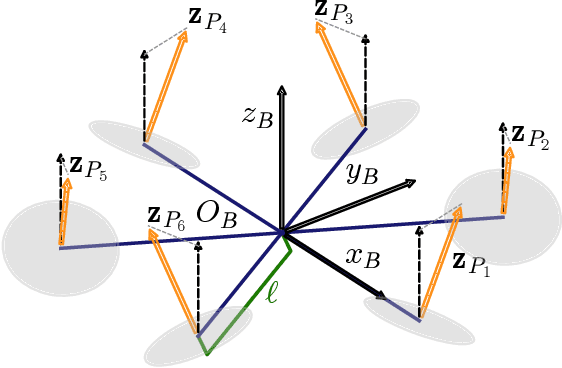
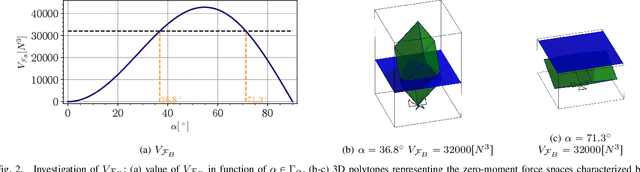
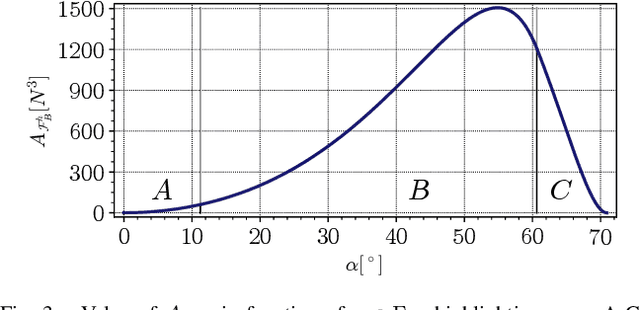
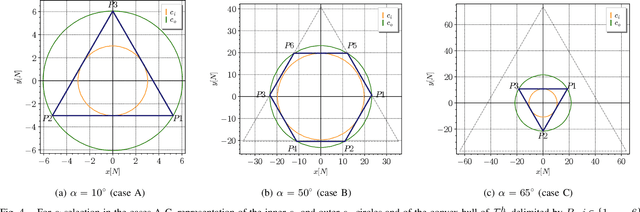
Star-shaped Tilted Hexarotors are rapidly emerging for applications highly demanding in terms of robustness and maneuverability. To ensure improvement in such features, a careful selection of the tilt angles is mandatory. In this work, we present a rigorous analysis of how the force subspace varies with the tilt cant angles, namely the tilt angles along the vehicle arms, taking into account gravity compensation and torque decoupling to abide by the hovering condition. Novel metrics are introduced to assess the performance of existing tilted platforms, as well as to provide some guidelines for the selection of the tilt cant angle in the design phase.