 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Batch-to-Streaming Deep Reinforcement Learning for Continuous Control
Mar 09, 2026State-of-the-art deep reinforcement learning (RL) methods have achieved remarkable performance in continuous control tasks, yet their computational complexity is often incompatible with the constraints of resource-limited hardware, due to their reliance on replay buffers, batch updates, and target networks. The emerging paradigm of streaming deep RL addresses this limitation through purely online updates, achieving strong empirical performance on standard benchmarks. In this work, we propose two novel streaming deep RL algorithms, Streaming Soft Actor-Critic (S2AC) and Streaming Deterministic Actor-Critic (SDAC), explicitly designed to be compatible with state-of-the-art batch RL methods, making them particularly suitable for on-device finetuning applications such as Sim2Real transfer. Both algorithms achieve performance comparable to state-of-the-art streaming baselines on standard benchmarks without requiring tedious hyperparameter tuning. Finally, we further investigate the practical challenges of transitioning from batch to streaming learning during finetuning and propose concrete strategies to tackle them.
A Distributed Approach to Autonomous Intersection Management via Multi-Agent Reinforcement Learning
May 14, 2024



Autonomous intersection management (AIM) poses significant challenges due to the intricate nature of real-world traffic scenarios and the need for a highly expensive centralised server in charge of simultaneously controlling all the vehicles. This study addresses such issues by proposing a novel distributed approach to AIM utilizing multi-agent reinforcement learning (MARL). We show that by leveraging the 3D surround view technology for advanced assistance systems, autonomous vehicles can accurately navigate intersection scenarios without needing any centralised controller. The contributions of this paper thus include a MARL-based algorithm for the autonomous management of a 4-way intersection and also the introduction of a new strategy called prioritised scenario replay for improved training efficacy. We validate our approach as an innovative alternative to conventional centralised AIM techniques, ensuring the full reproducibility of our results. Specifically, experiments conducted in virtual environments using the SMARTS platform highlight its superiority over benchmarks across various metrics.
A Fairness-Oriented Reinforcement Learning Approach for the Operation and Control of Shared Micromobility Services
Mar 23, 2024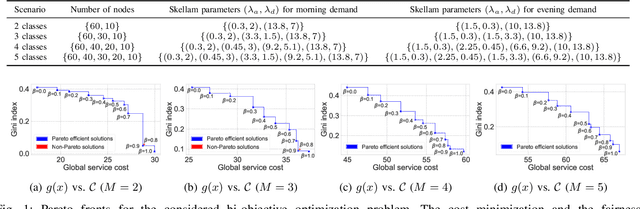
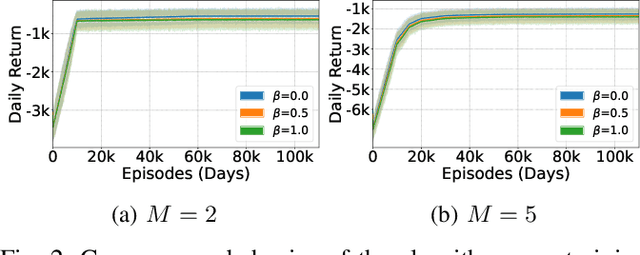

As Machine Learning systems become increasingly popular across diverse application domains, including those with direct human implications, the imperative of equity and algorithmic fairness has risen to prominence in the Artificial Intelligence community. On the other hand, in the context of Shared Micromobility Systems, the exploration of fairness-oriented approaches remains limited. Addressing this gap, we introduce a pioneering investigation into the balance between performance optimization and algorithmic fairness in the operation and control of Shared Micromobility Services. Our study leverages the Q-Learning algorithm in Reinforcement Learning, benefiting from its convergence guarantees to ensure the robustness of our proposed approach. Notably, our methodology stands out for its ability to achieve equitable outcomes, as measured by the Gini index, across different station categories--central, peripheral, and remote. Through strategic rebalancing of vehicle distribution, our approach aims to maximize operator performance while simultaneously upholding fairness principles for users. In addition to theoretical insights, we substantiate our findings with a case study or simulation based on synthetic data, validating the efficacy of our approach. This paper underscores the critical importance of fairness considerations in shaping control strategies for Shared Micromobility Services, offering a pragmatic framework for enhancing equity in urban transportation systems.