 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Study on Unsupervised Domain Adaptation for Semantic Segmentation in the Era of Vision-Language Models
Nov 25, 2024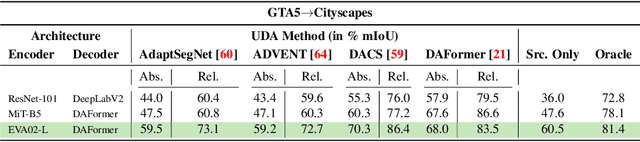
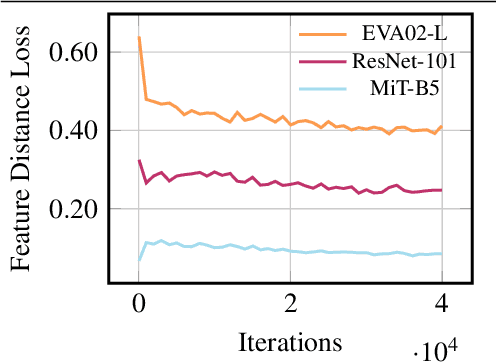
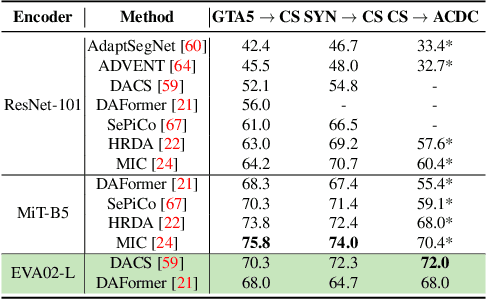
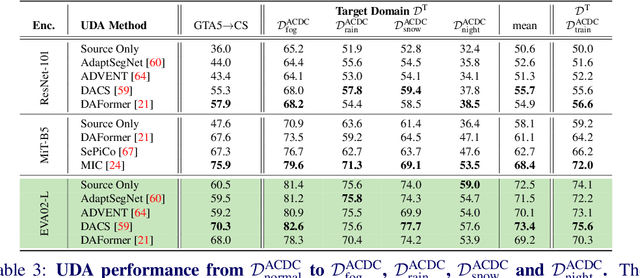
Despite the recent progress in deep learning based computer vision, domain shifts are still one of the major challenges. Semantic segmentation for autonomous driving faces a wide range of domain shifts, e.g. caused by changing weather conditions, new geolocations and the frequent use of synthetic data in model training. Unsupervised domain adaptation (UDA) methods have emerged which adapt a model to a new target domain by only using unlabeled data of that domain. The variety of UDA methods is large but all of them use ImageNet pre-trained models. Recently, vision-language models have demonstrated strong generalization capabilities which may facilitate domain adaptation. We show that simply replacing the encoder of existing UDA methods like DACS by a vision-language pre-trained encoder can result in significant performance improvements of up to 10.0% mIoU on the GTA5-to-Cityscapes domain shift. For the generalization performance to unseen domains, the newly employed vision-language pre-trained encoder provides a gain of up to 13.7% mIoU across three unseen datasets. However, we find that not all UDA methods can be easily paired with the new encoder and that the UDA performance does not always likewise transfer into generalization performance. Finally, we perform our experiments on an adverse weather condition domain shift to further verify our findings on a pure real-to-real domain shift.
Generalization by Adaptation: Diffusion-Based Domain Extension for Domain-Generalized Semantic Segmentation
Dec 04, 2023When models, e.g., for semantic segmentation, are applied to images that are vastly different from training data, the performance will drop significantly. Domain adaptation methods try to overcome this issue, but need samples from the target domain. However, this might not always be feasible for various reasons and therefore domain generalization methods are useful as they do not require any target data. We present a new diffusion-based domain extension (DIDEX) method and employ a diffusion model to generate a pseudo-target domain with diverse text prompts. In contrast to existing methods, this allows to control the style and content of the generated images and to introduce a high diversity. In a second step, we train a generalizing model by adapting towards this pseudo-target domain. We outperform previous approaches by a large margin across various datasets and architectures without using any real data. For the generalization from GTA5, we improve state-of-the-art mIoU performance by 3.8% absolute on average and for SYNTHIA by 11.8% absolute, marking a big step for the generalization performance on these benchmarks. Code is available at https://github.com/JNiemeijer/DIDEX
VLTSeg: Simple Transfer of CLIP-Based Vision-Language Representations for Domain Generalized Semantic Segmentation
Dec 04, 2023Domain generalization (DG) remains a significant challenge for perception based on deep neural networks (DNN), where domain shifts occur due to lighting, weather, or geolocation changes. In this work, we propose VLTSeg to enhance domain generalization in semantic segmentation, where the network is solely trained on the source domain and evaluated on unseen target domains. Our method leverages the inherent semantic robustness of vision-language models. First, by substituting traditional vision-only backbones with pre-trained encoders from CLIP and EVA-CLIP as transfer learning setting we find that in the field of DG, vision-language pre-training significantly outperforms supervised and self-supervised vision pre-training. We thus propose a new vision-language approach for domain generalized segmentation, which improves the domain generalization SOTA by 7.6% mIoU when training on the synthetic GTA5 dataset. We further show the superior generalization capabilities of vision-language segmentation models by reaching 76.48% mIoU on the popular Cityscapes-to-ACDC benchmark, outperforming the previous SOTA approach by 6.9% mIoU on the test set at the time of writing. Additionally, our approach shows strong in-domain generalization capabilities indicated by 86.1% mIoU on the Cityscapes test set, resulting in a shared first place with the previous SOTA on the current leaderboard at the time of submission.
Survey on Unsupervised Domain Adaptation for Semantic Segmentation for Visual Perception in Automated Driving
Apr 24, 2023Deep neural networks (DNNs) have proven their capabilities in many areas in the past years, such as robotics, or automated driving, enabling technological breakthroughs. DNNs play a significant role in environment perception for the challenging application of automated driving and are employed for tasks such as detection, semantic segmentation, and sensor fusion. Despite this progress and tremendous research efforts, several issues still need to be addressed that limit the applicability of DNNs in automated driving. The bad generalization of DNNs to new, unseen domains is a major problem on the way to a safe, large-scale application, because manual annotation of new domains is costly, particularly for semantic segmentation. For this reason, methods are required to adapt DNNs to new domains without labeling effort. The task, which these methods aim to solve is termed unsupervised domain adaptation (UDA). While several different domain shifts can challenge DNNs, the shift between synthetic and real data is of particular importance for automated driving, as it allows the use of simulation environments for DNN training. In this work, we present an overview of the current state of the art in this field of research. We categorize and explain the different approaches for UDA. The number of considered publications is larger than any other survey on this topic. The scope of this survey goes far beyond the description of the UDA state-of-the-art. Based on our large data and knowledge base, we present a quantitative comparison of the approaches and use the observations to point out the latest trends in this field. In the following, we conduct a critical analysis of the state-of-the-art and highlight promising future research directions. With this survey, we aim to facilitate UDA research further and encourage scientists to exploit novel research directions to generalize DNNs better.
Augmentation-based Domain Generalization for Semantic Segmentation
Apr 24, 2023


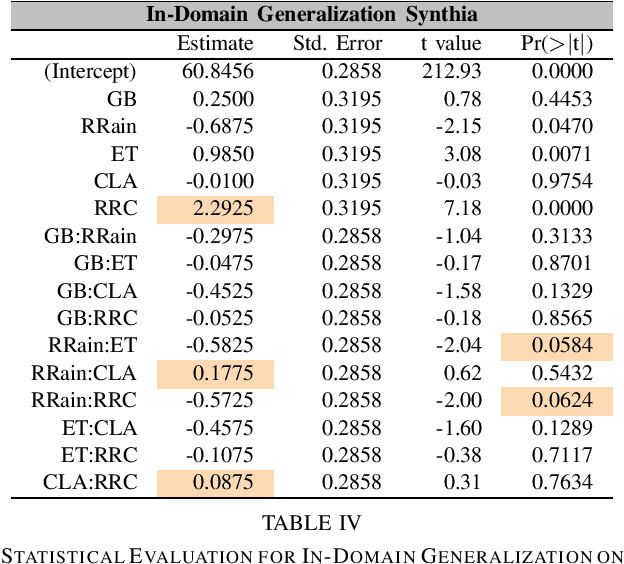
Unsupervised Domain Adaptation (UDA) and domain generalization (DG) are two research areas that aim to tackle the lack of generalization of Deep Neural Networks (DNNs) towards unseen domains. While UDA methods have access to unlabeled target images, domain generalization does not involve any target data and only learns generalized features from a source domain. Image-style randomization or augmentation is a popular approach to improve network generalization without access to the target domain. Complex methods are often proposed that disregard the potential of simple image augmentations for out-of-domain generalization. For this reason, we systematically study the in- and out-of-domain generalization capabilities of simple, rule-based image augmentations like blur, noise, color jitter and many more. Based on a full factorial design of experiment design we provide a systematic statistical evaluation of augmentations and their interactions. Our analysis provides both, expected and unexpected, outcomes. Expected, because our experiments confirm the common scientific standard that combination of multiple different augmentations out-performs single augmentations. Unexpected, because combined augmentations perform competitive to state-of-the-art domain generalization approaches, while being significantly simpler and without training overhead. On the challenging synthetic-to-real domain shift between Synthia and Cityscapes we reach 39.5% mIoU compared to 40.9% mIoU of the best previous work. When additionally employing the recent vision transformer architecture DAFormer we outperform these benchmarks with a performance of 44.2% mIoU