 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZ3D: Zero-Shot 3D Visual Grounding from Images
Feb 03, 20263D visual grounding (3DVG) aims to localize objects in a 3D scene based on natural language queries. In this work, we explore zero-shot 3DVG from multi-view images alone, without requiring any geometric supervision or object priors. We introduce Z3D, a universal grounding pipeline that flexibly operates on multi-view images while optionally incorporating camera poses and depth maps. We identify key bottlenecks in prior zero-shot methods causing significant performance degradation and address them with (i) a state-of-the-art zero-shot 3D instance segmentation method to generate high-quality 3D bounding box proposals and (ii) advanced reasoning via prompt-based segmentation, which utilizes full capabilities of modern VLMs. Extensive experiments on the ScanRefer and Nr3D benchmarks demonstrate that our approach achieves state-of-the-art performance among zero-shot methods. Code is available at https://github.com/col14m/z3d .
cadrille: Multi-modal CAD Reconstruction with Online Reinforcement Learning
May 28, 2025Computer-Aided Design (CAD) plays a central role in engineering and manufacturing, making it possible to create precise and editable 3D models. Using a variety of sensor or user-provided data as inputs for CAD reconstruction can democratize access to design applications. However, existing methods typically focus on a single input modality, such as point clouds, images, or text, which limits their generalizability and robustness. Leveraging recent advances in vision-language models (VLM), we propose a multi-modal CAD reconstruction model that simultaneously processes all three input modalities. Inspired by large language model (LLM) training paradigms, we adopt a two-stage pipeline: supervised fine-tuning (SFT) on large-scale procedurally generated data, followed by reinforcement learning (RL) fine-tuning using online feedback, obtained programatically. Furthermore, we are the first to explore RL fine-tuning of LLMs for CAD tasks demonstrating that online RL algorithms such as Group Relative Preference Optimization (GRPO) outperform offline alternatives. In the DeepCAD benchmark, our SFT model outperforms existing single-modal approaches in all three input modalities simultaneously. More importantly, after RL fine-tuning, cadrille sets new state-of-the-art on three challenging datasets, including a real-world one.
UniDet3D: Multi-dataset Indoor 3D Object Detection
Sep 06, 2024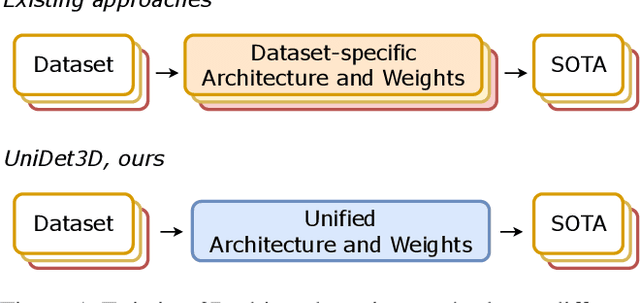
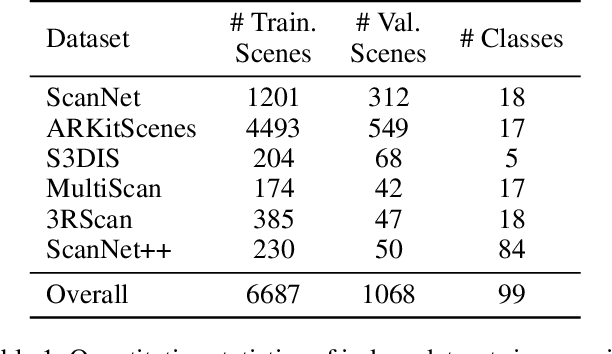
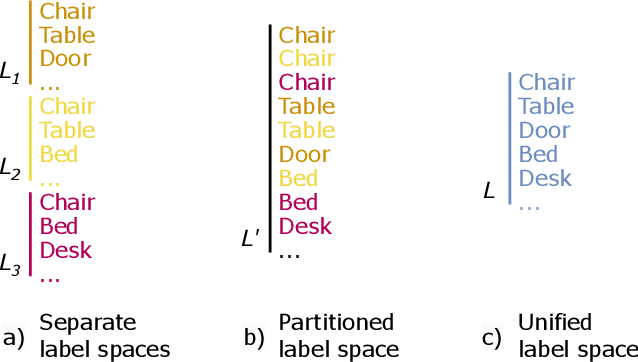
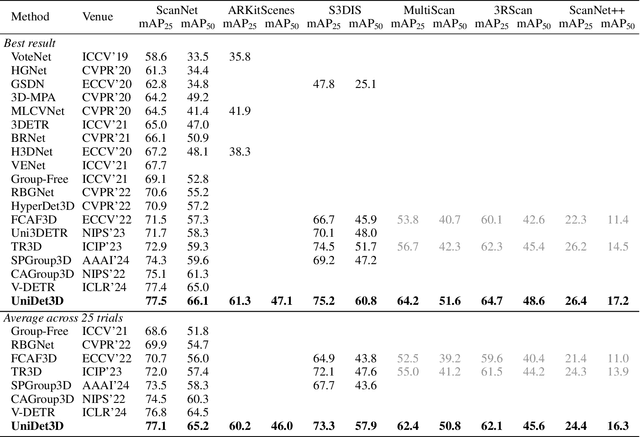
Growing customer demand for smart solutions in robotics and augmented reality has attracted considerable attention to 3D object detection from point clouds. Yet, existing indoor datasets taken individually are too small and insufficiently diverse to train a powerful and general 3D object detection model. In the meantime, more general approaches utilizing foundation models are still inferior in quality to those based on supervised training for a specific task. In this work, we propose \ours{}, a simple yet effective 3D object detection model, which is trained on a mixture of indoor datasets and is capable of working in various indoor environments. By unifying different label spaces, \ours{} enables learning a strong representation across multiple datasets through a supervised joint training scheme. The proposed network architecture is built upon a vanilla transformer encoder, making it easy to run, customize and extend the prediction pipeline for practical use. Extensive experiments demonstrate that \ours{} obtains significant gains over existing 3D object detection methods in 6 indoor benchmarks: ScanNet (+1.1 mAP50), ARKitScenes (+19.4 mAP25), S3DIS (+9.1 mAP50), MultiScan (+9.3 mAP50), 3RScan (+3.2 mAP50), and ScanNet++ (+2.7 mAP50). Code is available at https://github.com/filapro/unidet3d .
Top-Down Beats Bottom-Up in 3D Instance Segmentation
Feb 06, 2023



Most 3D instance segmentation methods exploit a bottom-up strategy, typically including resource-exhaustive post-processing. For point grouping, bottom-up methods rely on prior assumptions about the objects in the form of hyperparameters, which are domain-specific and need to be carefully tuned. On the contrary, we address 3D instance segmentation with a TD3D: top-down, fully data-driven, simple approach trained in an end-to-end manner. With its straightforward fully-convolutional pipeline, it performs surprisingly well on the standard benchmarks: ScanNet v2, its extension ScanNet200, and S3DIS. Besides, our method is much faster on inference than the current state-of-the-art grouping-based approaches. Code is available at https://github.com/SamsungLabs/td3d .