 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniDet3D: Multi-dataset Indoor 3D Object Detection
Paper and Code
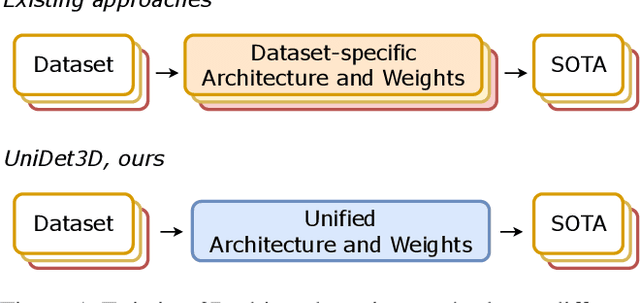
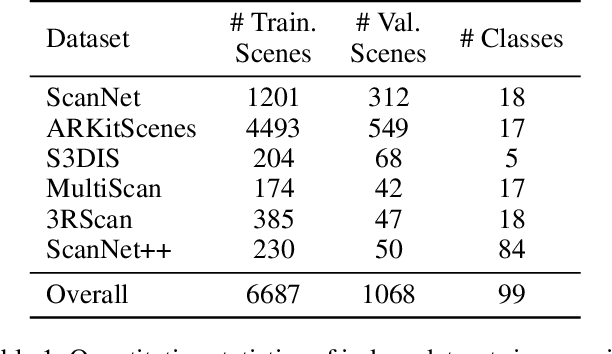
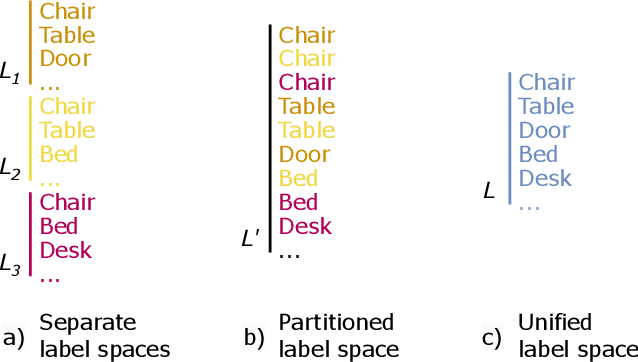
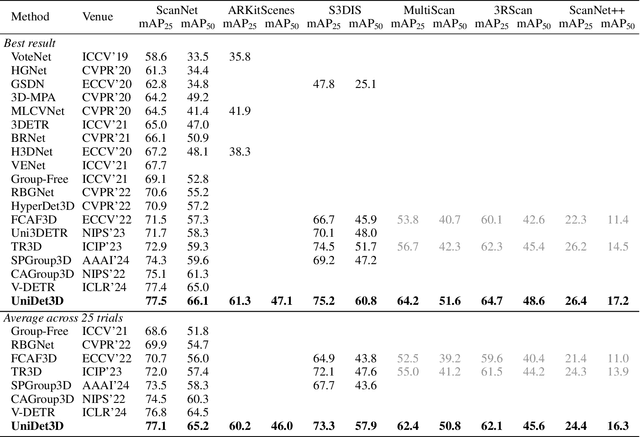
Growing customer demand for smart solutions in robotics and augmented reality has attracted considerable attention to 3D object detection from point clouds. Yet, existing indoor datasets taken individually are too small and insufficiently diverse to train a powerful and general 3D object detection model. In the meantime, more general approaches utilizing foundation models are still inferior in quality to those based on supervised training for a specific task. In this work, we propose \ours{}, a simple yet effective 3D object detection model, which is trained on a mixture of indoor datasets and is capable of working in various indoor environments. By unifying different label spaces, \ours{} enables learning a strong representation across multiple datasets through a supervised joint training scheme. The proposed network architecture is built upon a vanilla transformer encoder, making it easy to run, customize and extend the prediction pipeline for practical use. Extensive experiments demonstrate that \ours{} obtains significant gains over existing 3D object detection methods in 6 indoor benchmarks: ScanNet (+1.1 mAP50), ARKitScenes (+19.4 mAP25), S3DIS (+9.1 mAP50), MultiScan (+9.3 mAP50), 3RScan (+3.2 mAP50), and ScanNet++ (+2.7 mAP50). Code is available at https://github.com/filapro/unidet3d .