 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDusk Till Dawn: Self-supervised Nighttime Stereo Depth Estimation using Visual Foundation Models
May 18, 2024



Self-supervised depth estimation algorithms rely heavily on frame-warping relationships, exhibiting substantial performance degradation when applied in challenging circumstances, such as low-visibility and nighttime scenarios with varying illumination conditions. Addressing this challenge, we introduce an algorithm designed to achieve accurate self-supervised stereo depth estimation focusing on nighttime conditions. Specifically, we use pretrained visual foundation models to extract generalised features across challenging scenes and present an efficient method for matching and integrating these features from stereo frames. Moreover, to prevent pixels violating photometric consistency assumption from negatively affecting the depth predictions, we propose a novel masking approach designed to filter out such pixels. Lastly, addressing weaknesses in the evaluation of current depth estimation algorithms, we present novel evaluation metrics. Our experiments, conducted on challenging datasets including Oxford RobotCar and Multi-Spectral Stereo, demonstrate the robust improvements realized by our approach. Code is available at: https://github.com/madhubabuv/dtd
Spherical Mask: Coarse-to-Fine 3D Point Cloud Instance Segmentation with Spherical Representation
Dec 18, 2023Coarse-to-fine 3D instance segmentation methods show weak performances compared to recent Grouping-based, Kernel-based and Transformer-based methods. We argue that this is due to two limitations: 1) Instance size overestimation by axis-aligned bounding box(AABB) 2) False negative error accumulation from inaccurate box to the refinement phase. In this work, we introduce Spherical Mask, a novel coarse-to-fine approach based on spherical representation, overcoming those two limitations with several benefits. Specifically, our coarse detection estimates each instance with a 3D polygon using a center and radial distance predictions, which avoids excessive size estimation of AABB. To cut the error propagation in the existing coarse-to-fine approaches, we virtually migrate points based on the polygon, allowing all foreground points, including false negatives, to be refined. During inference, the proposal and point migration modules run in parallel and are assembled to form binary masks of instances. We also introduce two margin-based losses for the point migration to enforce corrections for the false positives/negatives and cohesion of foreground points, significantly improving the performance. Experimental results from three datasets, such as ScanNetV2, S3DIS, and STPLS3D, show that our proposed method outperforms existing works, demonstrating the effectiveness of the new instance representation with spherical coordinates.
Tighter Variational Bounds are Not Necessarily Better. A Research Report on Implementation, Ablation Study, and Extensions
Sep 23, 2022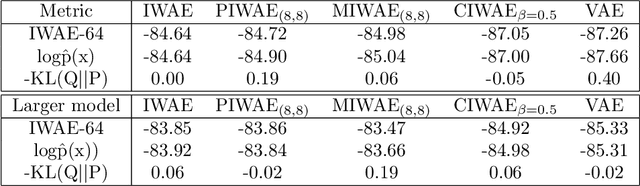
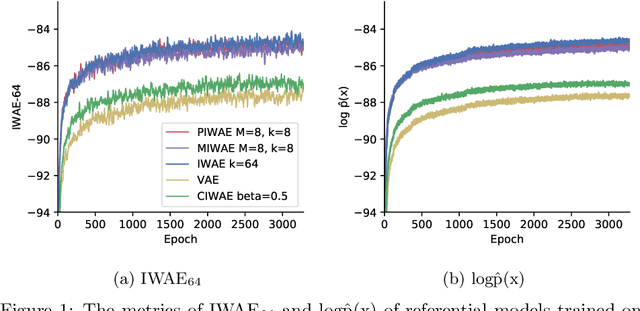
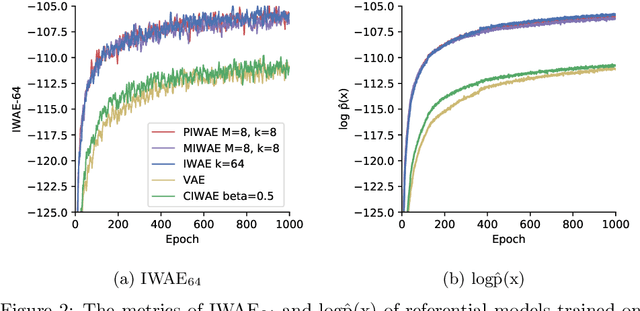

This report explains, implements and extends the works presented in "Tighter Variational Bounds are Not Necessarily Better" (T Rainforth et al., 2018). We provide theoretical and empirical evidence that increasing the number of importance samples $K$ in the importance weighted autoencoder (IWAE) (Burda et al., 2016) degrades the signal-to-noise ratio (SNR) of the gradient estimator in the inference network and thereby affecting the full learning process. In other words, even though increasing $K$ decreases the standard deviation of the gradients, it also reduces the magnitude of the true gradient faster, thereby increasing the relative variance of the gradient updates. Extensive experiments are performed to understand the importance of $K$. These experiments suggest that tighter variational bounds are beneficial for the generative network, whereas looser bounds are preferable for the inference network. With these insights, three methods are implemented and studied: the partially importance weighted autoencoder (PIWAE), the multiply importance weighted autoencoder (MIWAE) and the combination importance weighted autoencoder (CIWAE). Each of these three methods entails IWAE as a special case but employs the importance weights in different ways to ensure a higher SNR of the gradient estimators. In our research study and analysis, the efficacy of these algorithms is tested on multiple datasets such as MNIST and Omniglot. Finally, we demonstrate that the three presented IWAE variations are able to generate approximate posterior distributions that are much closer to the true posterior distribution than for the IWAE, while matching the performance of the IWAE generative network or potentially outperforming it in the case of PIWAE.
Sample, Crop, Track: Self-Supervised Mobile 3D Object Detection for Urban Driving LiDAR
Sep 21, 2022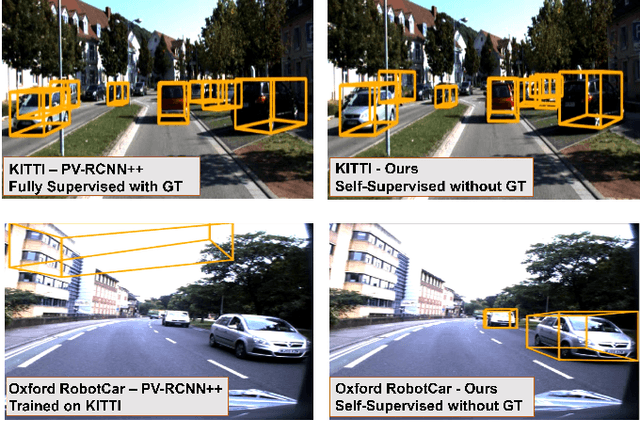
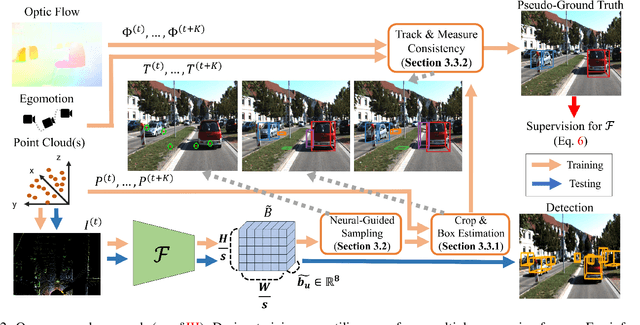
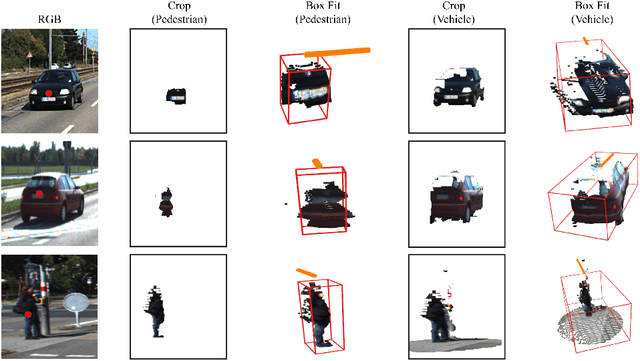
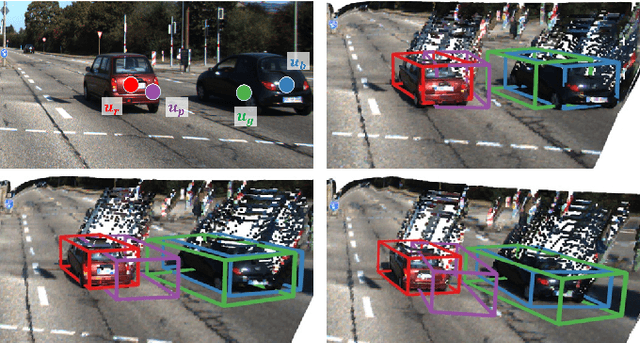
Deep learning has led to great progress in the detection of mobile (i.e. movement-capable) objects in urban driving scenes in recent years. Supervised approaches typically require the annotation of large training sets; there has thus been great interest in leveraging weakly, semi- or self-supervised methods to avoid this, with much success. Whilst weakly and semi-supervised methods require some annotation, self-supervised methods have used cues such as motion to relieve the need for annotation altogether. However, a complete absence of annotation typically degrades their performance, and ambiguities that arise during motion grouping can inhibit their ability to find accurate object boundaries. In this paper, we propose a new self-supervised mobile object detection approach called SCT. This uses both motion cues and expected object sizes to improve detection performance, and predicts a dense grid of 3D oriented bounding boxes to improve object discovery. We significantly outperform the state-of-the-art self-supervised mobile object detection method TCR on the KITTI tracking benchmark, and achieve performance that is within 30% of the fully supervised PV-RCNN++ method for IoUs <= 0.5.
When the Sun Goes Down: Repairing Photometric Losses for All-Day Depth Estimation
Jun 28, 2022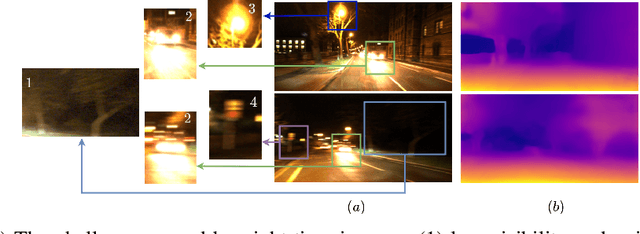
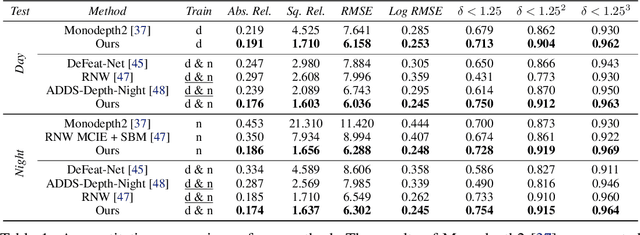
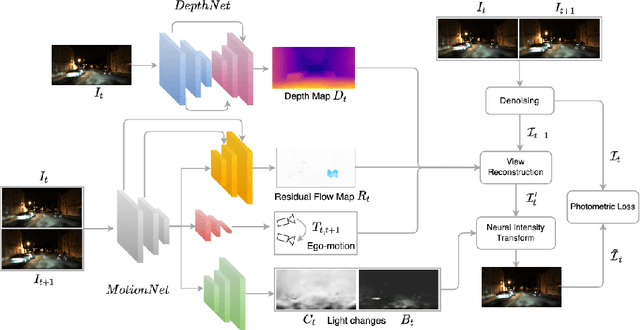
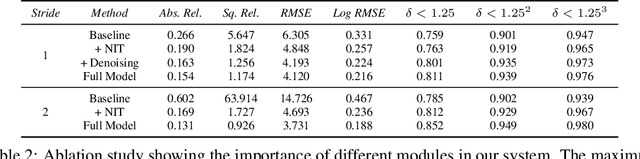
Self-supervised deep learning methods for joint depth and ego-motion estimation can yield accurate trajectories without needing ground-truth training data. However, as they typically use photometric losses, their performance can degrade significantly when the assumptions these losses make (e.g. temporal illumination consistency, a static scene, and the absence of noise and occlusions) are violated. This limits their use for e.g. nighttime sequences, which tend to contain many point light sources (including on dynamic objects) and low signal-to-noise ratio (SNR) in darker image regions. In this paper, we show how to use a combination of three techniques to allow the existing photometric losses to work for both day and nighttime images. First, we introduce a per-pixel neural intensity transformation to compensate for the light changes that occur between successive frames. Second, we predict a per-pixel residual flow map that we use to correct the reprojection correspondences induced by the estimated ego-motion and depth from the networks. And third, we denoise the training images to improve the robustness and accuracy of our approach. These changes allow us to train a single model for both day and nighttime images without needing separate encoders or extra feature networks like existing methods. We perform extensive experiments and ablation studies on the challenging Oxford RobotCar dataset to demonstrate the efficacy of our approach for both day and nighttime sequences.
Real-Time Hybrid Mapping of Populated Indoor Scenes using a Low-Cost Monocular UAV
Mar 04, 2022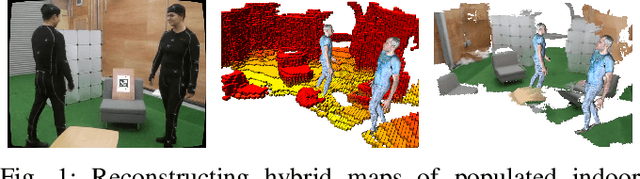
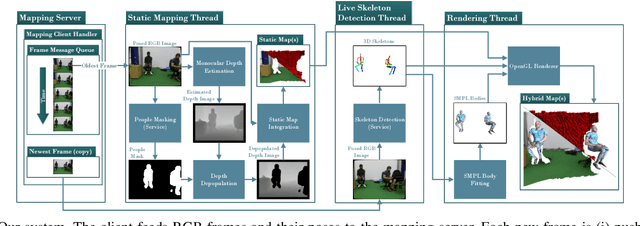
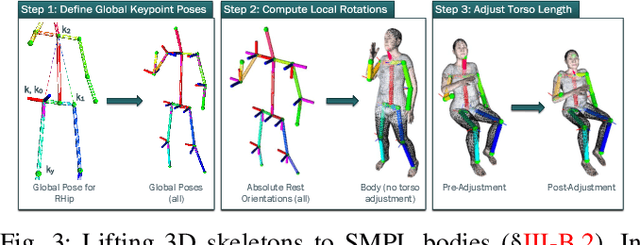
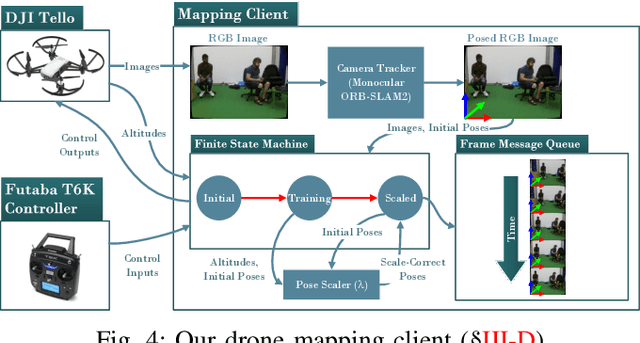
Unmanned aerial vehicles (UAVs) have been used for many applications in recent years, from urban search and rescue, to agricultural surveying, to autonomous underground mine exploration. However, deploying UAVs in tight, indoor spaces, especially close to humans, remains a challenge. One solution, when limited payload is required, is to use micro-UAVs, which pose less risk to humans and typically cost less to replace after a crash. However, micro-UAVs can only carry a limited sensor suite, e.g. a monocular camera instead of a stereo pair or LiDAR, complicating tasks like dense mapping and markerless multi-person 3D human pose estimation, which are needed to operate in tight environments around people. Monocular approaches to such tasks exist, and dense monocular mapping approaches have been successfully deployed for UAV applications. However, despite many recent works on both marker-based and markerless multi-UAV single-person motion capture, markerless single-camera multi-person 3D human pose estimation remains a much earlier-stage technology, and we are not aware of existing attempts to deploy it in an aerial context. In this paper, we present what is thus, to our knowledge, the first system to perform simultaneous mapping and multi-person 3D human pose estimation from a monocular camera mounted on a single UAV. In particular, we show how to loosely couple state-of-the-art monocular depth estimation and monocular 3D human pose estimation approaches to reconstruct a hybrid map of a populated indoor scene in real time. We validate our component-level design choices via extensive experiments on the large-scale ScanNet and GTA-IM datasets. To evaluate our system-level performance, we also construct a new Oxford Hybrid Mapping dataset of populated indoor scenes.
Unsupervised Monocular Depth Estimation for Night-time Images using Adversarial Domain Feature Adaptation
Oct 03, 2020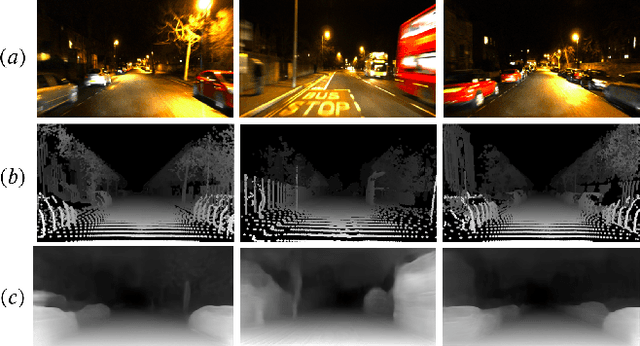
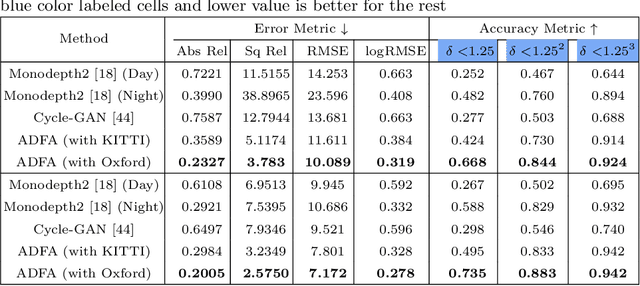
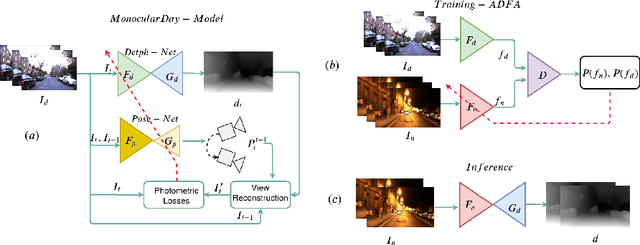
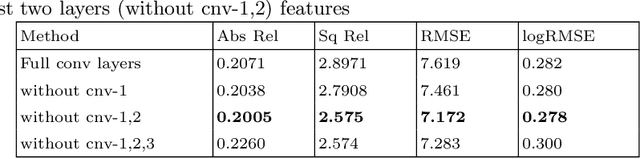
In this paper, we look into the problem of estimating per-pixel depth maps from unconstrained RGB monocular night-time images which is a difficult task that has not been addressed adequately in the literature. The state-of-the-art day-time depth estimation methods fail miserably when tested with night-time images due to a large domain shift between them. The usual photo metric losses used for training these networks may not work for night-time images due to the absence of uniform lighting which is commonly present in day-time images, making it a difficult problem to solve. We propose to solve this problem by posing it as a domain adaptation problem where a network trained with day-time images is adapted to work for night-time images. Specifically, an encoder is trained to generate features from night-time images that are indistinguishable from those obtained from day-time images by using a PatchGAN-based adversarial discriminative learning method. Unlike the existing methods that directly adapt depth prediction (network output), we propose to adapt feature maps obtained from the encoder network so that a pre-trained day-time depth decoder can be directly used for predicting depth from these adapted features. Hence, the resulting method is termed as "Adversarial Domain Feature Adaptation (ADFA)" and its efficacy is demonstrated through experimentation on the challenging Oxford night driving dataset. Also, The modular encoder-decoder architecture for the proposed ADFA method allows us to use the encoder module as a feature extractor which can be used in many other applications. One such application is demonstrated where the features obtained from our adapted encoder network are shown to outperform other state-of-the-art methods in a visual place recognition problem, thereby, further establishing the usefulness and effectiveness of the proposed approach.