 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Token/KV-Cache Communication Media Selection and Resource Allocation Strategy for Multi-Agent Collaboration
May 25, 2026The convergence of large language models (LLMs) with 6G networks is fostering a paradigm of autonomous multi-agent cooperation, which in turn is expected to substantially increase east-west traffic. Although latent-space interaction mechanisms can enable more efficient collaboration than symbolic natural-language (NL) exchanges, prior work often abstracts away the associated communication overhead under practical wireless constraints. In embodied multi-agent settings, heterogeneous interaction media incur disparate inference and transmission costs, thereby inducing an inherent end-to-end (E2E) latency trade-off. To address this, we propose a joint design that integrates communication-media selection with wireless resource allocation. Through analytical characterization and simulation-based evaluation, we show that neither token-based transmission nor key-value (KV) cache-based transmission is uniformly optimal across operating regimes, as performance depends critically on system parameters such as available computational resources and channel conditions. Accordingly, we formulate a joint optimization problem aimed at minimizing the E2E latency of multi-agent collaboration and develop a low-complexity joint media selection and resource allocation (JMSRA) algorithm. Numerical results further confirm that, by adaptively coordinating the interaction media and bandwidth allocation over heterogeneous links, the proposed scheme achieves markedly reduced E2E latency relative to conventional NL-only and KV-cache-only baselines, enabling efficient and robust multi-agent collaboration in future wireless networks.
6G Communication Networks Enabling Embodied Agents: Architecture and Prototype
May 22, 2026Embodied agents, which couple intelligent decision-making with physical actuation in the real world, impose far more stringent and heterogeneous communication requirements than purely software-based agents. While 6G promises sub-millisecond latency, ultra-high reliability, native intelligence, and integrated sensing, systematic studies on how to exploit these capabilities for embodied agent communication remain limited. This article investigates 6G-enabled communication systems for embodied agents from both conceptual and engineering perspectives. First, we review the concept, embodiment value of embodied agents, and clarify their distinctions from disembodied agents. Then, we analyse the symbiotic relationship between embodied agents and 6G networks. We highlight how key 6G enablers can support the stringent requirements of human-robot interaction. Furthermore, we demonstrate the proactive role of embodied agents in bolstering communication networks through coverage extension, environmental sensing, and physical world understanding. Building on these insights, we propose a hierarchical communication architecture for human-robot remote interaction, comprising a human-intent perception layer, an open radio access network (O-RAN)-based transport layer, an intelligent intermediary layer, and an embodiment layer. To validate its feasibility, we implement an end-to-end prototype that integrates a haptic device, an industrial robotic arm, an intermediary platform, and a 5G O-RAN testbed. Experimental results demonstrate millisecond-level latency and stable closed-loop operation, confirming the practicality of the proposed architecture and providing a reference for future 6G-embodied agent research and industrial deployments.
Low-cost Parallel Transmission for Dense Indoor Data Collection with LoRaWAN: Time Synchronization and Resource Allocation
May 22, 2026LoRaWAN is a compelling low-cost solution for large-scale indoor Internet of Things (IoT) data backhaul, owing to its strong penetration capability and low power consumption. However, its default pure ALOHA access mechanism leads to severe channel contention, substantial packet loss, and reduced throughput under dense, concurrent transmissions. To overcome this, we propose a lightweight out-of-band (OOB) synchronization scheme that integrates a time division multiple access (TDMA) mechanism into commercial LoRaWAN Class~A networks. Unlike approaches requiring gateway scheduling, frequent downlink signaling, or custom hardware, our method introduces a single low-cost node providing millisecond-level alignment via a dedicated OOB synchronization channel. End devices seamlessly access this channel by briefly retuning their existing LoRa transceivers. Consequently, the scheme imposes zero downlink overhead during the steady-state reporting phase, requires no hardware modifications to gateways or end devices, and remains fully backward-compatible. This design enables collision-free scheduled channel access within the configured nominal resource capacity, thereby improving throughput and reducing contention. Real-world experiments using an indoor positioning prototype demonstrate that the proposed TDMA-LoRaWAN architecture improves system throughput by over 30\% and reduces the packet loss rate from 25.8\% to 5.02\% in a 20-node indoor deployment. Furthermore, large-scale simulations corroborate these empirical findings, support the scalability analysis under larger network sizes, and indicate improved energy efficiency per successful packet in dense network settings. These combined results demonstrate the effectiveness of the proposed approach for dense indoor IoT data collection and indicate its practical potential under high uplink reporting demands.
A Camera-Cooperative ISAC Framework for Multimodal Non-Cooperative UAVs Sensing
May 21, 2026The detection of non-cooperative unmanned aerial vehicles (UAVs) presents significant challenges for Integrated Sensing and Communication (ISAC) systems due to the inherent limitations of single-modal perception and the competition for shared communication and sensing resources. To address these challenges, this paper proposes a novel Camera-Cooperative ISAC (CC-ISAC) framework that employs multimodal sensing to enable efficient UAV beam steering and tracking. The proposed framework employs cameras for coarse-grained airspace monitoring and utilizes ISAC for fine-grained, high-precision sensing, forming a complementary perception loop that enhances both sensing accuracy and resource efficiency. Within this framework, two key modules are developed: (1) a Vision-to-Echo Data Alignment (V2EDA) model that aligns visual and echo-domain features through cross-attention mechanisms, and (2) a Multimodal Fusion-Based Estimation (MMFE) model that integrates historical multimodal data with current observations for robust state estimation. Extensive evaluations conducted on the DeepSense 6G dataset demonstrate that the proposed framework achieves an average reduction of 71% in beam steering overhead and 1.69-11.15% in tracking overhead while maintaining high angular estimation accuracy. The CC-ISAC framework effectively mitigates resource contention between sensing and communication, enabling reliable UAV surveillance while freeing substantial system resources for additional communication tasks, thereby representing a practical advancement in ISAC system design.
SimART: A Unified and Open Real-world Multimodal Simulation Platform for 6G Integrated Sensing and Communication
May 13, 2026Research on sixth-generation (6G) integrated sensing and communication (ISAC) increasingly depends on multimodal datasets. These datasets need to jointly characterize wireless propagation, onboard sensing, and platform mobility. Existing tools cover only part of these aspects. Robotics simulators model physics and perception but not site-specific channels, while ray tracing and link level tools lack vehicle dynamics and onboard sensors. Combining them manually leads to workflows that are fragile and hard to reproduce. Rather than introducing another standalone simulator, this article presents SimART. It integrates mature robotics, ray tracing, and wireless evaluation engines into a single reproducible pipeline. The key idea is a robot operating system (ROS) backbone that both synchronizes and organizes all multimodal streams. A shared clock, a common coordinate frame, and timestamped messages keep the streams aligned in time and space, and a single rosbag recording captures the full session into one reproducible file. This design decouples the sensing front end from the wireless back end, so that any ROS-compatible simulator can be plugged in while reusing the same back end across aerial, ground, indoor, and maritime ISAC settings. On top of this backbone, SimART contributes a scene construction pipeline that converts both OpenStreetMap extracts and user-defined layouts into spatially aligned visual and electromagnetic assets, and a channel knowledge map (CKM) generator that aggregates ray tracing and system level outputs into spatial priors for ISAC algorithms. A case study on vision and position aided beam prediction demonstrates the utility of the platform. The code is publicly available at https://github.com/guchuanv-alt/SimART.
DBU-OFDM: A Trainable Deep Block-Unitary OFDM Waveform for Integrated Sensing and Communication
Apr 11, 2026Orthogonal frequency-division multiplexing (OFDM) is a dominant waveform in modern wireless systems, yet its high peak-to-average power ratio (PAPR) and limited adaptability hinder efficient support for integrated communication and sensing. This paper proposes deep block-unitary precoded OFDM (DBU-OFDM), a structure-preserving learning framework that enables trainable waveform adaptation while preserving the DFT-based signal structure, pilot/null resource protection, and compatibility with low-complexity frequency-domain equalization. The proposed design restricts learning to a block-unitary transformation over data subcarriers and preserves pilot and null resources for structural compatibility. The transform is parameterized by recursive Householder reflections, ensuring strict unitarity as well as differentiable, numerically stable, and complexity-controllable implementation. Results show that DBU-OFDM achieves PAPR tails close to block-pilot DFT-s-OFDM while retaining comb-type pilots, improves communication reliability in frequency-selective fading via frequency-domain diversity, and enhances range and velocity estimation in direct sensing, especially in dimension-limited settings. Over-the-air USRP experiments and FPGA prototyping further verify its practical feasibility, demonstrating low error vector magnitude (EVM), clear PAPR reduction in real transmission, and hardware throughput up to 200~MS/s with microsecond-level latency. DBU-OFDM therefore offers a practical intermediate solution between conventional model-based OFDM waveforms and unconstrained neural transceivers for next-generation integrated communication and sensing systems.
Algorithm Design and Prototype Validation for Reconfigurable Intelligent Sensing Surface: Forward-Only Transmission
Mar 31, 2025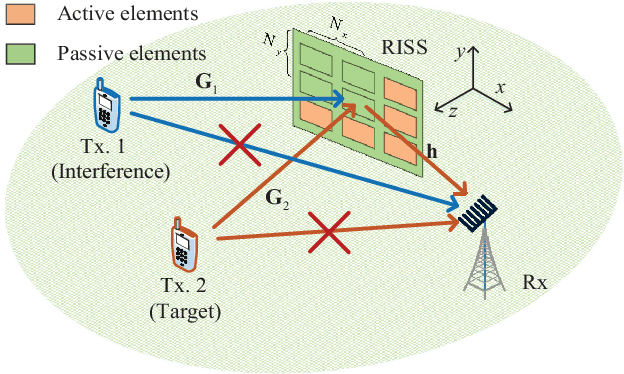
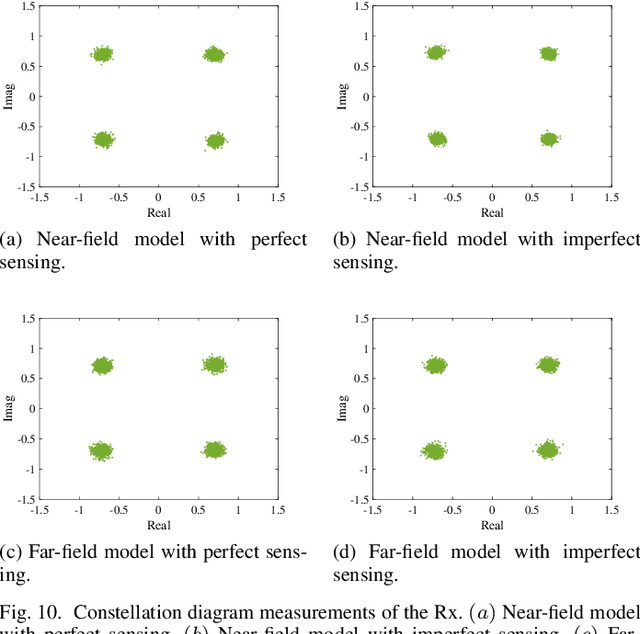
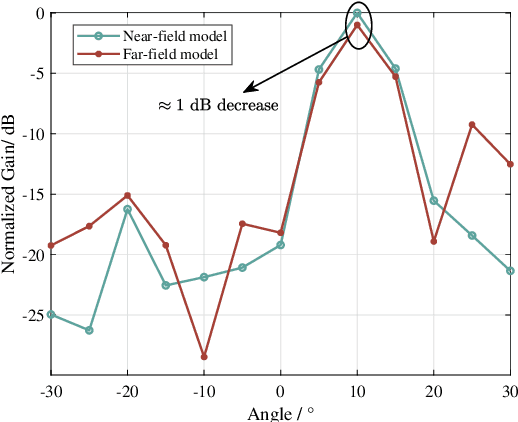
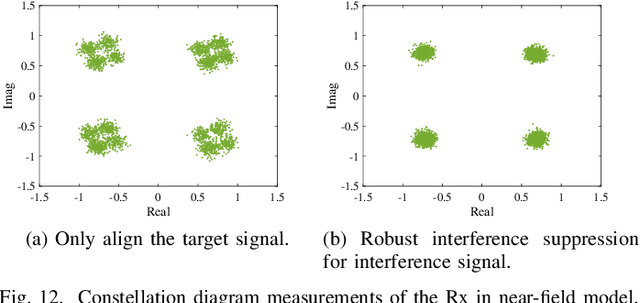
Sensing-assisted communication schemes have recently garnered significant research attention. In this work, we design a dual-function reconfigurable intelligent surface (RIS), integrating both active and passive elements, referred to as the reconfigurable intelligent sensing surface (RISS), to enhance communication. By leveraging sensing results from the active elements, we propose communication enhancement and robust interference suppression schemes for both near-field and far-field models, implemented through the passive elements. These schemes remove the need for base station (BS) feedback for RISS control, simplifying the communication process by replacing traditional channel state information (CSI) feedback with real-time sensing from the active elements. The proposed schemes are theoretically analyzed and then validated using software-defined radio (SDR). Experimental results demonstrate the effectiveness of the sensing algorithms in real-world scenarios, such as direction of arrival (DOA) estimation and radio frequency (RF) identification recognition. Moreover, the RISS-assisted communication system shows strong performance in communication enhancement and interference suppression, particularly in near-field models.
Low-Complexity Beamforming Design for Null Space-based Simultaneous Wireless Information and Power Transfer Systems
Mar 11, 2025



Simultaneous wireless information and power transfer (SWIPT) is a promising technology for the upcoming sixth-generation (6G) communication networks, enabling internet of things (IoT) devices and sensors to extend their operational lifetimes. In this paper, we propose a SWIPT scheme by projecting the interference signals from both intra-wireless information transfer (WIT) and inter-wireless energy transfer (WET) into the null space, simplifying the system into a point-to-point WIT and WET problem. Upon further analysis, we confirm that dedicated energy beamforming is unnecessary. In addition, we develop a low-complexity algorithm to solve the problem efficiently, further reducing computational overhead. Numerical results validate our analysis, showing that the computational complexity is reduced by 97.5\% and 99.96\% for the cases of $K^I = K^E = 2$, $M = 4$ and $K^I = K^E = 16$, $M = 64$, respectively.
Bedrock Models in Communication and Sensing: Advancing Generalization, Transferability, and Performance
Mar 11, 2025



Deep learning (DL) has emerged as a powerful tool for addressing the intricate challenges inherent in communication and sensing systems, significantly enhancing the intelligence of future sixth-generation (6G) networks. A substantial body of research has highlighted the promise of DL-based techniques in these domains. However, in addition to improving accuracy, new challenges must be addressed regarding the generalization and transferability of DL-based systems. To tackle these issues, this paper introduces a series of mathematically grounded and modularized models, referred to as bedrock models, specifically designed for integration into both communication and sensing systems. Due to their modular architecture, these models can be seamlessly incorporated into existing communication and sensing frameworks. For communication systems, the proposed models demonstrate substantial performance improvements while also exhibit strong transferability, enabling direct parameter sharing across different tasks, which greatly facilitates practical deployment. In sensing applications, the integration of the bedrock models into existing systems results in superior performance, reducing delay and Doppler estimation errors by an order of magnitude compared to traditional methods. Additionally, a pre-equalization strategy based on the bedrock models is proposed for the transmitter. By leveraging sensing information, the transmitted communication signal is dynamically adjusted without altering the communication model pre-trained in AWGN channels. This adaptation enables the system to effectively cope with doubly dispersive channels, restoring the received signal to an AWGN-like condition and achieving near-optimal performance. Simulation results substantiate the effectiveness and transferability of the proposed bedrock models, underscoring their potential to advance both communication and sensing systems.
SIMAC: A Semantic-Driven Integrated Multimodal Sensing And Communication Framework
Mar 11, 2025Traditional single-modality sensing faces limitations in accuracy and capability, and its decoupled implementation with communication systems increases latency in bandwidth-constrained environments. Additionally, single-task-oriented sensing systems fail to address users' diverse demands. To overcome these challenges, we propose a semantic-driven integrated multimodal sensing and communication (SIMAC) framework. This framework leverages a joint source-channel coding architecture to achieve simultaneous sensing decoding and transmission of sensing results. Specifically, SIMAC first introduces a multimodal semantic fusion (MSF) network, which employs two extractors to extract semantic information from radar signals and images, respectively. MSF then applies cross-attention mechanisms to fuse these unimodal features and generate multimodal semantic representations. Secondly, we present a large language model (LLM)-based semantic encoder (LSE), where relevant communication parameters and multimodal semantics are mapped into a unified latent space and input to the LLM, enabling channel-adaptive semantic encoding. Thirdly, a task-oriented sensing semantic decoder (SSD) is proposed, in which different decoded heads are designed according to the specific needs of tasks. Simultaneously, a multi-task learning strategy is introduced to train the SIMAC framework, achieving diverse sensing services. Finally, experimental simulations demonstrate that the proposed framework achieves diverse sensing services and higher accuracy.