 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantity over Quality: Training an AV Motion Planner with Large Scale Commodity Vision Data
Mar 03, 2022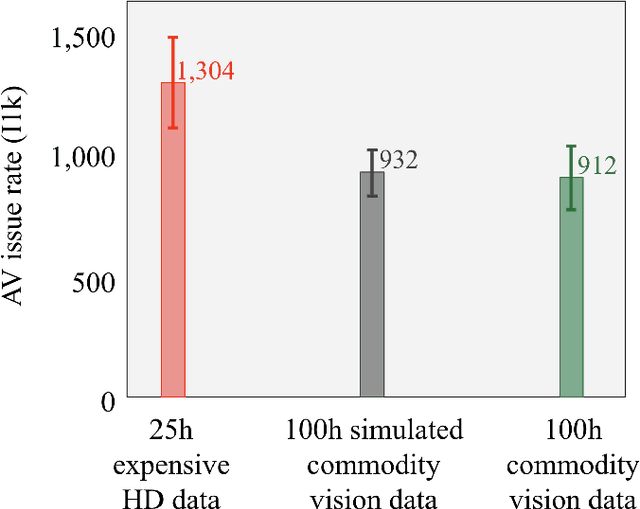
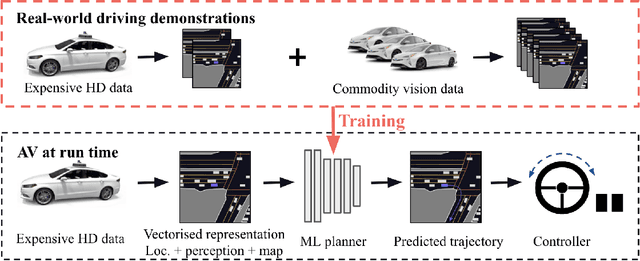
With the Autonomous Vehicle (AV) industry shifting towards Autonomy 2.0, the performance of self-driving systems starts to rely heavily on large quantities of expert driving demonstrations. However, collecting this demonstration data typically involves expensive HD sensor suites (LiDAR + RADAR + cameras), which quickly becomes financially infeasible at the scales required. This motivates the use of commodity vision sensors for data collection, which are an order of magnitude cheaper than the HD sensor suites, but offer lower fidelity. If it were possible to leverage these for training an AV motion planner, observing the `long tail' of driving events would become a financially viable strategy. As our main contribution we show it is possible to train a high-performance motion planner using commodity vision data which outperforms planners trained on HD-sensor data for a fraction of the cost. We do this by comparing the autonomy system performance when training on these two different sensor configurations, and showing that we can compensate for the lower sensor fidelity by means of increased quantity: a planner trained on 100h of commodity vision data outperforms one with 25h of expensive HD data. We also share the technical challenges we had to tackle to make this work. To the best of our knowledge, we are the first to demonstrate that this is possible using real-world data.
What data do we need for training an AV motion planner?
May 26, 2021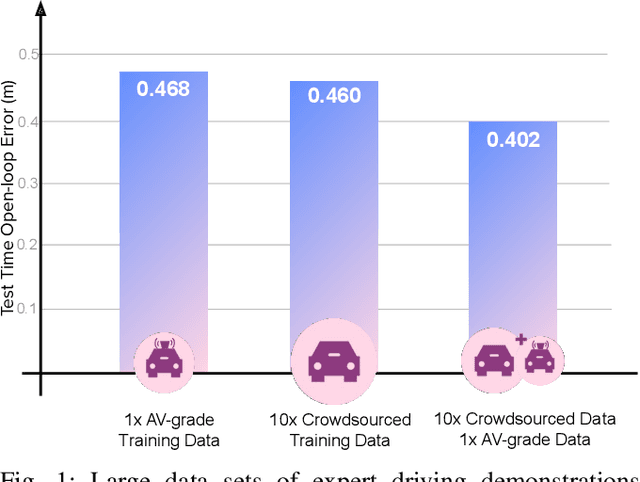
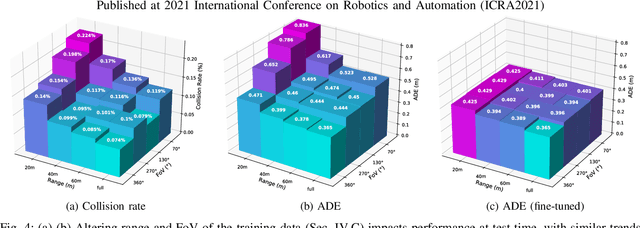
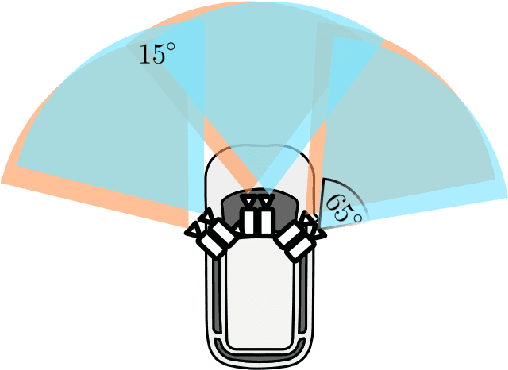
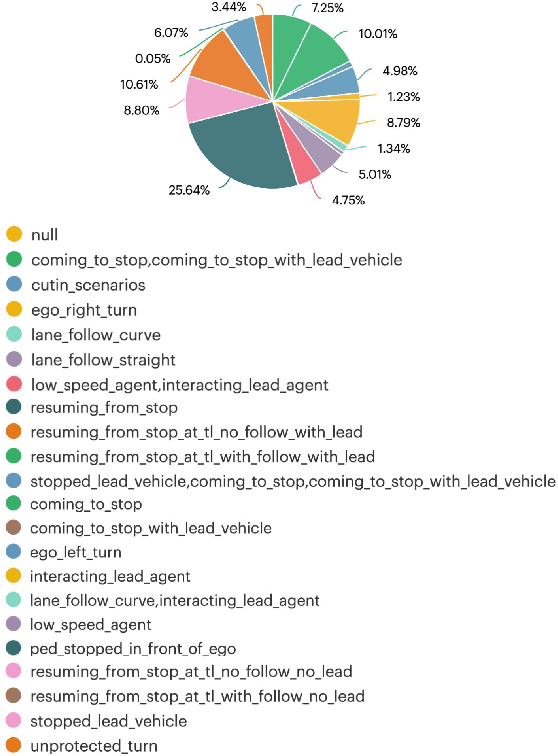
We investigate what grade of sensor data is required for training an imitation-learning-based AV planner on human expert demonstration. Machine-learned planners are very hungry for training data, which is usually collected using vehicles equipped with the same sensors used for autonomous operation. This is costly and non-scalable. If cheaper sensors could be used for collection instead, data availability would go up, which is crucial in a field where data volume requirements are large and availability is small. We present experiments using up to 1000 hours worth of expert demonstration and find that training with 10x lower-quality data outperforms 1x AV-grade data in terms of planner performance. The important implication of this is that cheaper sensors can indeed be used. This serves to improve data access and democratize the field of imitation-based motion planning. Alongside this, we perform a sensitivity analysis of planner performance as a function of perception range, field-of-view, accuracy, and data volume, and the reason why lower-quality data still provide good planning results.
Collaborative Augmented Reality on Smartphones via Life-long City-scale Maps
Nov 10, 2020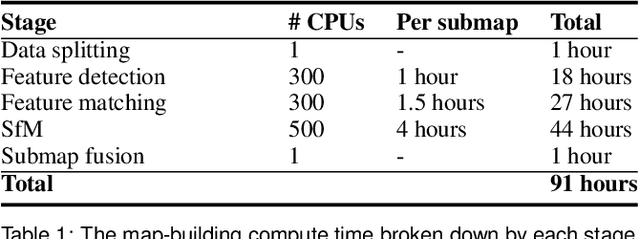
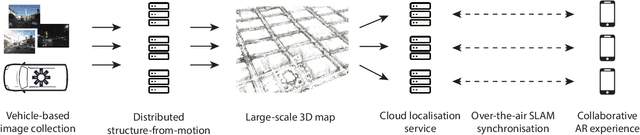
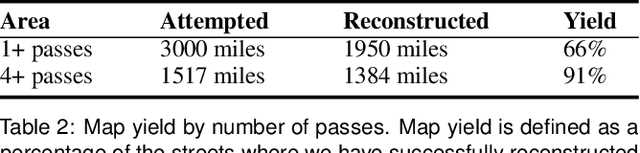
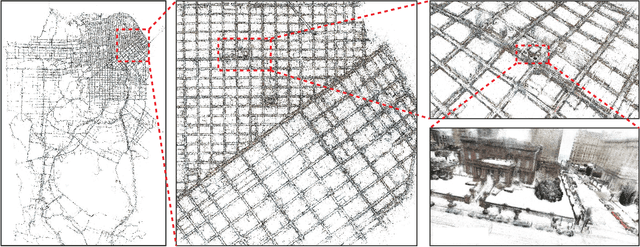
In this paper we present the first published end-to-end production computer-vision system for powering city-scale shared augmented reality experiences on mobile devices. In doing so we propose a new formulation for an experience-based mapping framework as an effective solution to the key issues of city-scale SLAM scalability, robustness, map updates and all-time all-weather performance required by a production system. Furthermore, we propose an effective way of synchronising SLAM systems to deliver seamless real-time localisation of multiple edge devices at the same time. All this in the presence of network latency and bandwidth limitations. The resulting system is deployed and tested at scale in San Francisco where it delivers AR experiences in a mapped area of several hundred kilometers. To foster further development of this area we offer the data set to the public, constituting the largest of this kind to date.