 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Augmented Reality on Smartphones via Life-long City-scale Maps
Nov 10, 2020
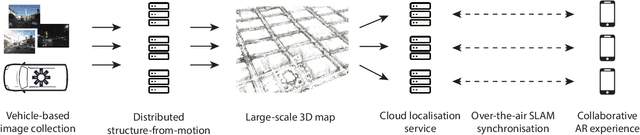
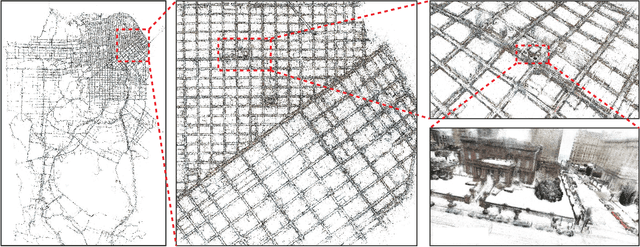
In this paper we present the first published end-to-end production computer-vision system for powering city-scale shared augmented reality experiences on mobile devices. In doing so we propose a new formulation for an experience-based mapping framework as an effective solution to the key issues of city-scale SLAM scalability, robustness, map updates and all-time all-weather performance required by a production system. Furthermore, we propose an effective way of synchronising SLAM systems to deliver seamless real-time localisation of multiple edge devices at the same time. All this in the presence of network latency and bandwidth limitations. The resulting system is deployed and tested at scale in San Francisco where it delivers AR experiences in a mapped area of several hundred kilometers. To foster further development of this area we offer the data set to the public, constituting the largest of this kind to date.