 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Evaluation of Self-Supervised Learning for Label-Efficient Sleep Staging with Wearable EEG
Oct 09, 2025Wearable EEG devices have emerged as a promising alternative to polysomnography (PSG). As affordable and scalable solutions, their widespread adoption results in the collection of massive volumes of unlabeled data that cannot be analyzed by clinicians at scale. Meanwhile, the recent success of deep learning for sleep scoring has relied on large annotated datasets. Self-supervised learning (SSL) offers an opportunity to bridge this gap, leveraging unlabeled signals to address label scarcity and reduce annotation effort. In this paper, we present the first systematic evaluation of SSL for sleep staging using wearable EEG. We investigate a range of well-established SSL methods and evaluate them on two sleep databases acquired with the Ikon Sleep wearable EEG headband: BOAS, a high-quality benchmark containing PSG and wearable EEG recordings with consensus labels, and HOGAR, a large collection of home-based, self-recorded, and unlabeled recordings. Three evaluation scenarios are defined to study label efficiency, representation quality, and cross-dataset generalization. Results show that SSL consistently improves classification performance by up to 10% over supervised baselines, with gains particularly evident when labeled data is scarce. SSL achieves clinical-grade accuracy above 80% leveraging only 5% to 10% of labeled data, while the supervised approach requires twice the labels. Additionally, SSL representations prove robust to variations in population characteristics, recording environments, and signal quality. Our findings demonstrate the potential of SSL to enable label-efficient sleep staging with wearable EEG, reducing reliance on manual annotations and advancing the development of affordable sleep monitoring systems.
MultiPhysio-HRC: Multimodal Physiological Signals Dataset for industrial Human-Robot Collaboration
Oct 01, 2025Human-robot collaboration (HRC) is a key focus of Industry 5.0, aiming to enhance worker productivity while ensuring well-being. The ability to perceive human psycho-physical states, such as stress and cognitive load, is crucial for adaptive and human-aware robotics. This paper introduces MultiPhysio-HRC, a multimodal dataset containing physiological, audio, and facial data collected during real-world HRC scenarios. The dataset includes electroencephalography (EEG), electrocardiography (ECG), electrodermal activity (EDA), respiration (RESP), electromyography (EMG), voice recordings, and facial action units. The dataset integrates controlled cognitive tasks, immersive virtual reality experiences, and industrial disassembly activities performed manually and with robotic assistance, to capture a holistic view of the participants' mental states. Rich ground truth annotations were obtained using validated psychological self-assessment questionnaires. Baseline models were evaluated for stress and cognitive load classification, demonstrating the dataset's potential for affective computing and human-aware robotics research. MultiPhysio-HRC is publicly available to support research in human-centered automation, workplace well-being, and intelligent robotic systems.
EventSleep: Sleep Activity Recognition with Event Cameras
Apr 02, 2024Event cameras are a promising technology for activity recognition in dark environments due to their unique properties. However, real event camera datasets under low-lighting conditions are still scarce, which also limits the number of approaches to solve these kind of problems, hindering the potential of this technology in many applications. We present EventSleep, a new dataset and methodology to address this gap and study the suitability of event cameras for a very relevant medical application: sleep monitoring for sleep disorders analysis. The dataset contains synchronized event and infrared recordings emulating common movements that happen during the sleep, resulting in a new challenging and unique dataset for activity recognition in dark environments. Our novel pipeline is able to achieve high accuracy under these challenging conditions and incorporates a Bayesian approach (Laplace ensembles) to increase the robustness in the predictions, which is fundamental for medical applications. Our work is the first application of Bayesian neural networks for event cameras, the first use of Laplace ensembles in a realistic problem, and also demonstrates for the first time the potential of event cameras in a new application domain: to enhance current sleep evaluation procedures. Our activity recognition results highlight the potential of event cameras under dark conditions, and its capacity and robustness for sleep activity recognition, and open problems as the adaptation of event data pre-processing techniques to dark environments.
Body Schema Acquisition through Active Learning
Feb 08, 2024We present an active learning algorithm for the problem of body schema learning, i.e. estimating a kinematic model of a serial robot. The learning process is done online using Recursive Least Squares (RLS) estimation, which outperforms gradient methods usually applied in the literature. In addiction, the method provides the required information to apply an active learning algorithm to find the optimal set of robot configurations and observations to improve the learning process. By selecting the most informative observations, the proposed method minimizes the required amount of data. We have developed an efficient version of the active learning algorithm to select the points in real-time. The algorithms have been tested and compared using both simulated environments and a real humanoid robot.
* International Conference on Robotics and Automation (ICRA) 2010
Event Transformer+. A multi-purpose solution for efficient event data processing
Nov 22, 2022Event cameras record sparse illumination changes with high temporal resolution and high dynamic range. Thanks to their sparse recording and low consumption, they are increasingly used in applications such as AR/VR and autonomous driving. Current top-performing methods often ignore specific event-data properties, leading to the development of generic but computationally expensive algorithms, while event-aware methods do not perform as well. We propose Event Transformer+, that improves our seminal work evtprev EvT with a refined patch-based event representation and a more robust backbone to achieve more accurate results, while still benefiting from event-data sparsity to increase its efficiency. Additionally, we show how our system can work with different data modalities and propose specific output heads, for event-stream predictions (i.e. action recognition) and per-pixel predictions (dense depth estimation). Evaluation results show better performance to the state-of-the-art while requiring minimal computation resources, both on GPU and CPU.
Event Transformer. A sparse-aware solution for efficient event data processing
Apr 18, 2022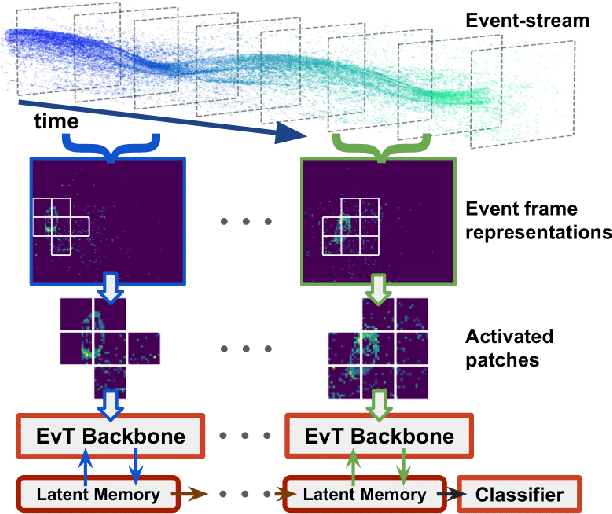
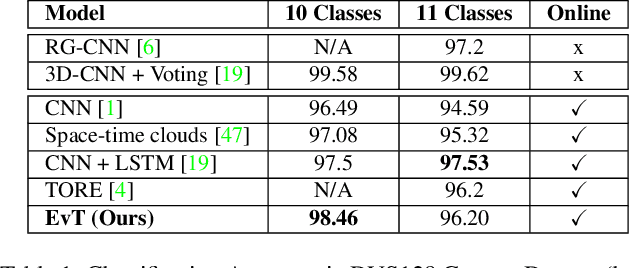
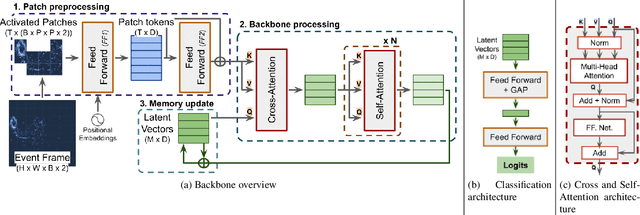

Event cameras are sensors of great interest for many applications that run in low-resource and challenging environments. They log sparse illumination changes with high temporal resolution and high dynamic range, while they present minimal power consumption. However, top-performing methods often ignore specific event-data properties, leading to the development of generic but computationally expensive algorithms. Efforts toward efficient solutions usually do not achieve top-accuracy results for complex tasks. This work proposes a novel framework, Event Transformer (EvT), that effectively takes advantage of event-data properties to be highly efficient and accurate. We introduce a new patch-based event representation and a compact transformer-like architecture to process it. EvT is evaluated on different event-based benchmarks for action and gesture recognition. Evaluation results show better or comparable accuracy to the state-of-the-art while requiring significantly less computation resources, which makes EvT able to work with minimal latency both on GPU and CPU.
Semi-Supervised Semantic Segmentation with Pixel-Level Contrastive Learning from a Class-wise Memory Bank
Apr 27, 2021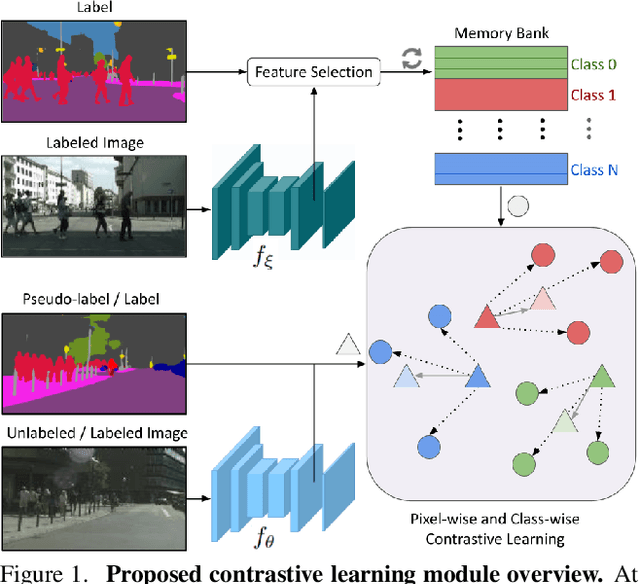
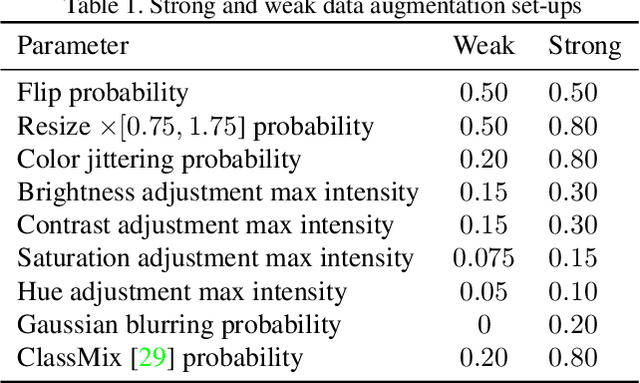
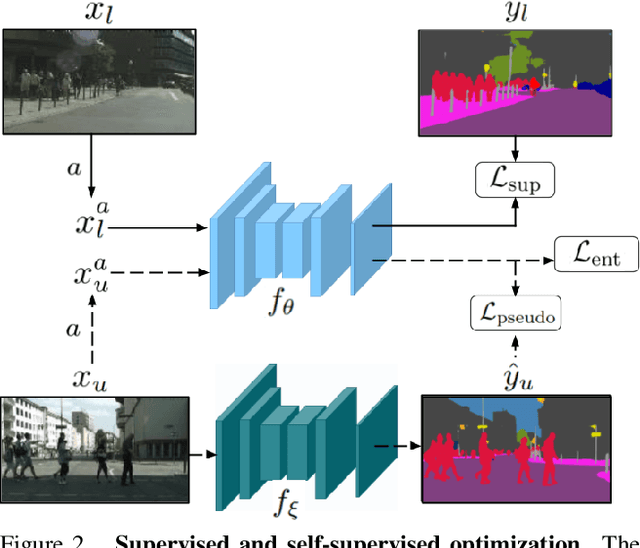
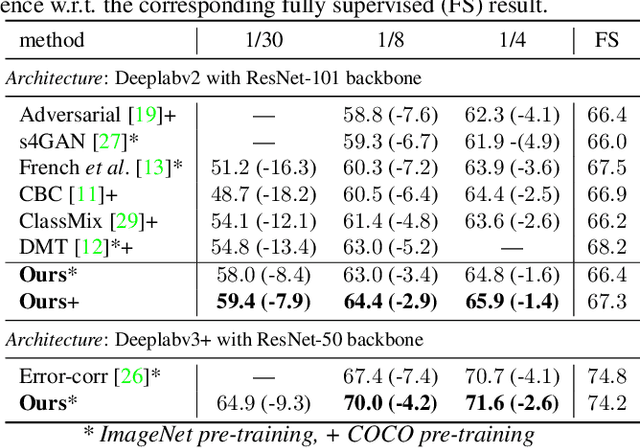
This work presents a novel approach for semi-supervised semantic segmentation, i.e., per-pixel classification problem assuming that only a small set of the available data is labeled. We propose a novel representation learning module based on contrastive learning. This module enforces the segmentation network to yield similar pixel-level feature representations for same-class samples across the whole dataset. To achieve this, we maintain a memory bank continuously updated with feature vectors from labeled data. These features are selected based on their quality and relevance for the contrastive learning. In an end-to-end training, the features from both labeled and unlabeled data are optimized to be similar to same-class samples from the memory bank. Our approach outperforms the current state-of-the-art for semi-supervised semantic segmentation and semi-supervised domain adaptation on well-known public benchmarks, with larger improvements on the most challenging scenarios, i.e., less available labeled data.
Domain and View-point Agnostic Hand Action Recognition
Mar 03, 2021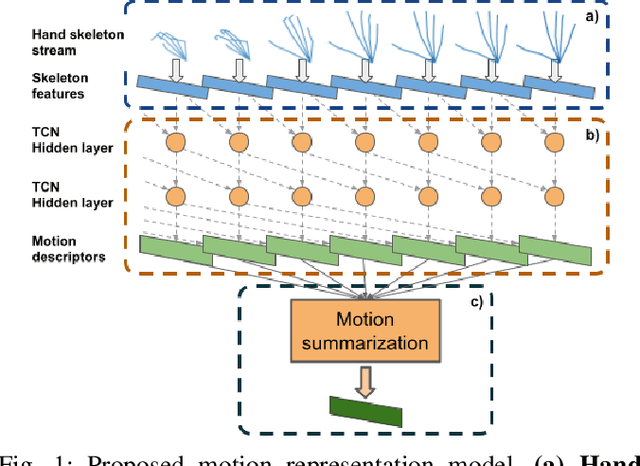
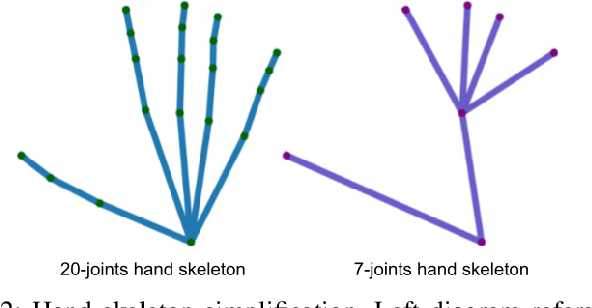
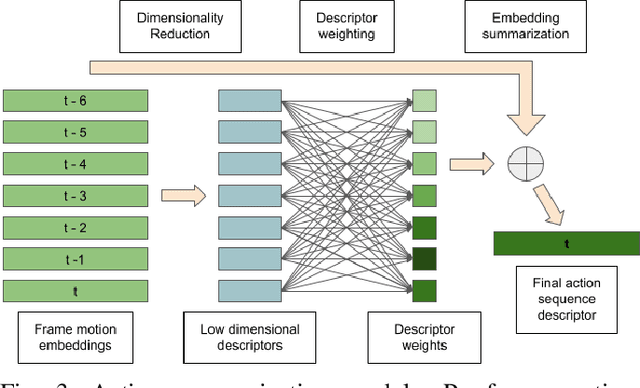
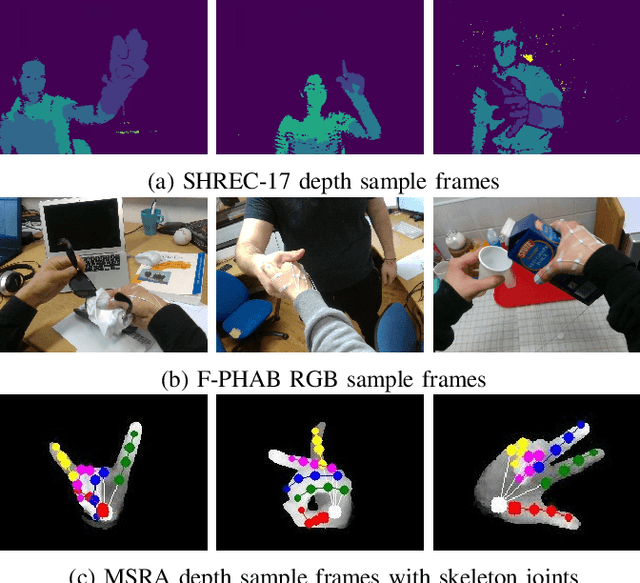
Hand action recognition is a special case of human action recognition with applications in human robot interaction, virtual reality or life-logging systems. Building action classifiers that are useful to recognize such heterogeneous set of activities is very challenging. There are very subtle changes across different actions from a given application but also large variations across domains (e.g. virtual reality vs life-logging). This work introduces a novel skeleton-based hand motion representation model that tackles this problem. The framework we propose is agnostic to the application domain or camera recording view-point. We demonstrate the performance of our proposed motion representation model both working for a single specific domain (intra-domain action classification) and working for different unseen domains (cross-domain action classification). For the intra-domain case, our approach gets better or similar performance than current state-of-the-art methods on well-known hand action recognition benchmarks. And when performing cross-domain hand action recognition (i.e., training our motion representation model in frontal-view recordings and testing it both for egocentric and third-person views), our approach achieves comparable results to the state-of-the-art methods that are trained intra-domain.
One-shot action recognition towards novel assistive therapies
Feb 17, 2021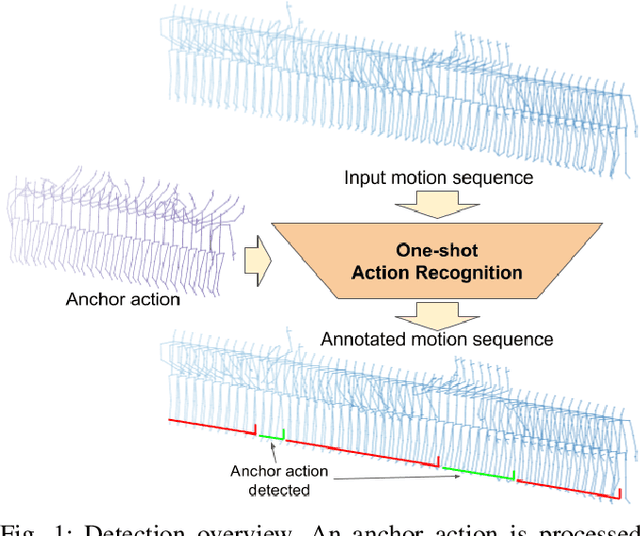
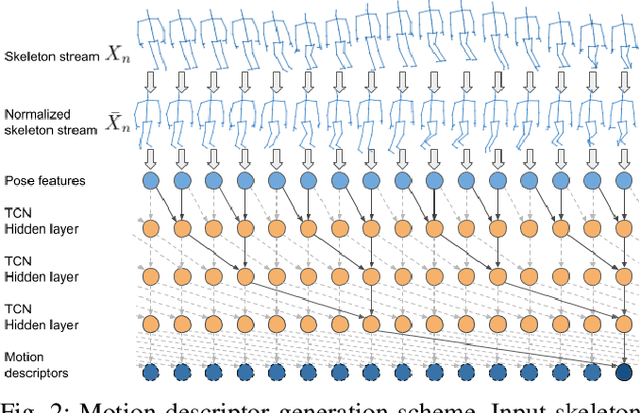
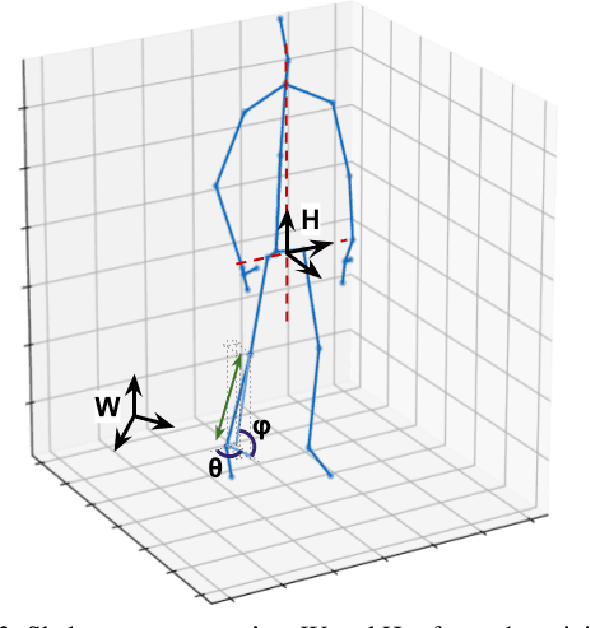
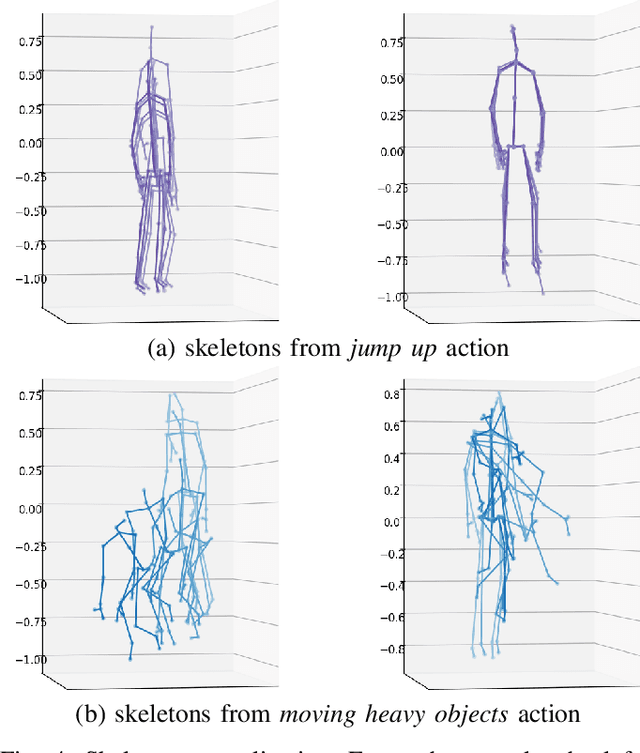
One-shot action recognition is a challenging problem, especially when the target video can contain one, more or none repetitions of the target action. Solutions to this problem can be used in many real world applications that require automated processing of activity videos. In particular, this work is motivated by the automated analysis of medical therapies that involve action imitation games. The presented approach incorporates a pre-processing step that standardizes heterogeneous motion data conditions and generates descriptive movement representations with a Temporal Convolutional Network for a final one-shot (or few-shot) action recognition. Our method achieves state-of-the-art results on the public NTU-120 one-shot action recognition challenge. Besides, we evaluate the approach on a real use-case of automated video analysis for therapy support with autistic people. The promising results prove its suitability for this kind of application in the wild, providing both quantitative and qualitative measures, essential for the patient evaluation and monitoring.
Robust and efficient post-processing for video object detection
Sep 23, 2020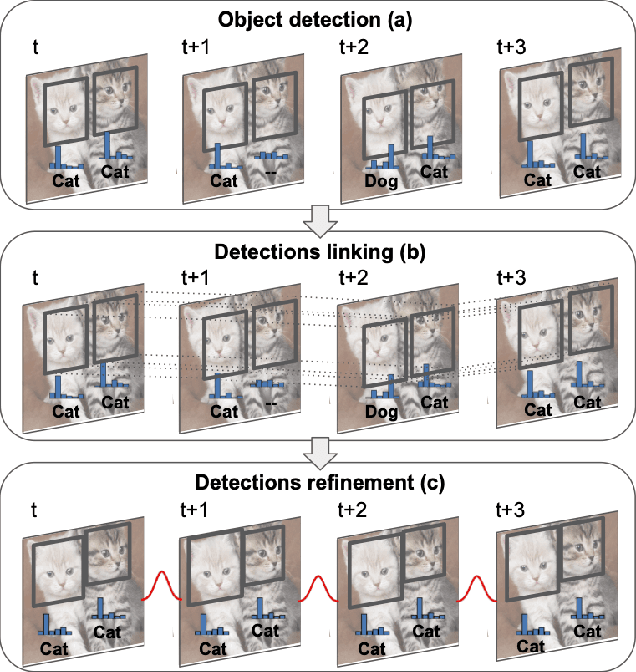
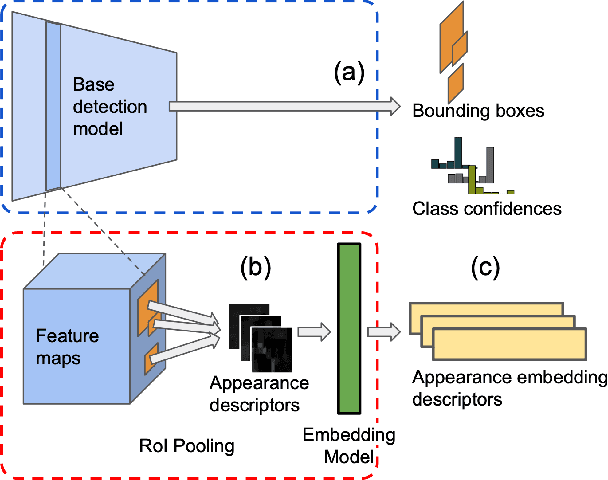
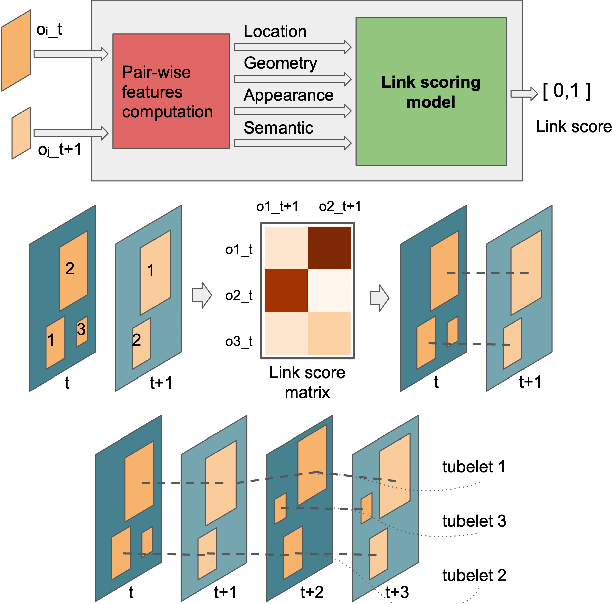
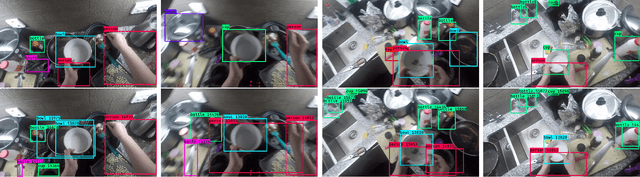
Object recognition in video is an important task for plenty of applications, including autonomous driving perception, surveillance tasks, wearable devices or IoT networks. Object recognition using video data is more challenging than using still images due to blur, occlusions or rare object poses. Specific video detectors with high computational cost or standard image detectors together with a fast post-processing algorithm achieve the current state-of-the-art. This work introduces a novel post-processing pipeline that overcomes some of the limitations of previous post-processing methods by introducing a learning-based similarity evaluation between detections across frames. Our method improves the results of state-of-the-art specific video detectors, specially regarding fast moving objects, and presents low resource requirements. And applied to efficient still image detectors, such as YOLO, provides comparable results to much more computationally intensive detectors.