 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Indian Chefs Process
Jan 29, 2020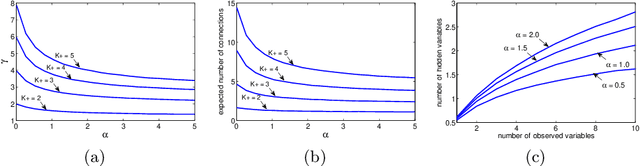


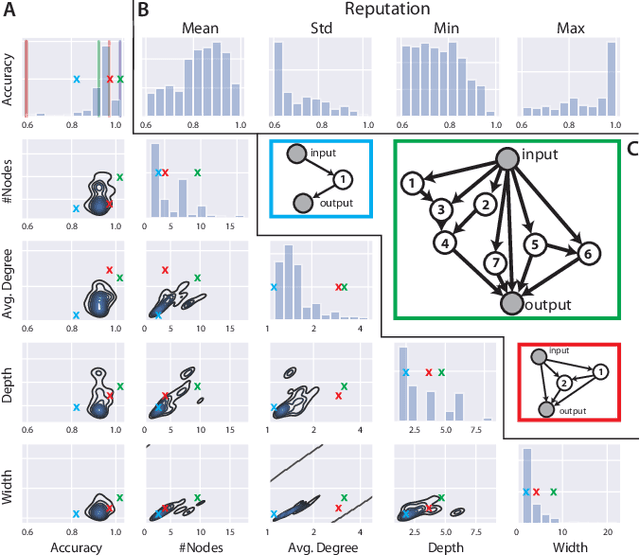
This paper introduces the Indian Chefs Process (ICP), a Bayesian nonparametric prior on the joint space of infinite directed acyclic graphs (DAGs) and orders that generalizes Indian Buffet Processes. As our construction shows, the proposed distribution relies on a latent Beta Process controlling both the orders and outgoing connection probabilities of the nodes, and yields a probability distribution on sparse infinite graphs. The main advantage of the ICP over previously proposed Bayesian nonparametric priors for DAG structures is its greater flexibility. To the best of our knowledge, the ICP is the first Bayesian nonparametric model supporting every possible DAG. We demonstrate the usefulness of the ICP on learning the structure of deep generative sigmoid networks as well as convolutional neural networks.
Multi-Task Learning by Deep Collaboration and Application in Facial Landmark Detection
Mar 15, 2018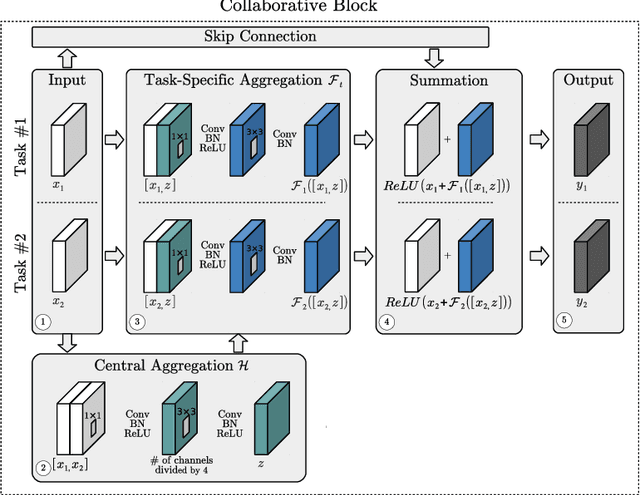
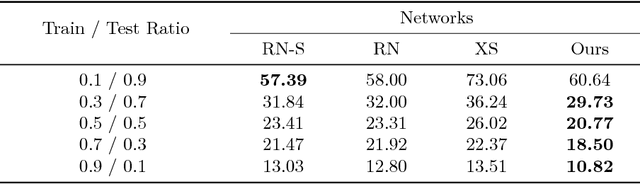
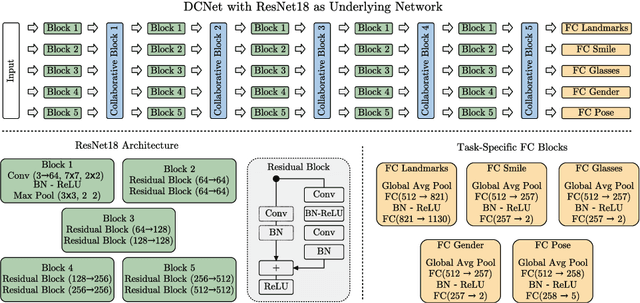
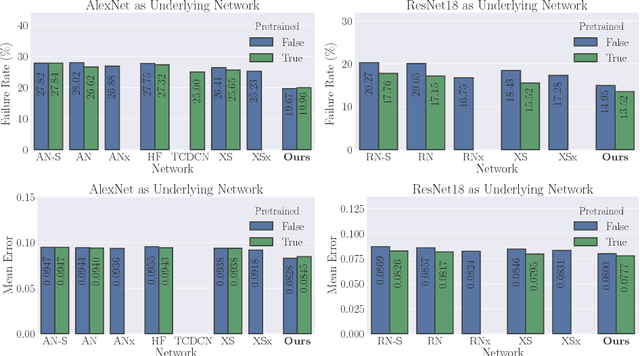
Convolutional neural networks (CNNs) have become the most successful approach in many vision-related domains. However, they are limited to domains where data is abundant. Recent works have looked at multi-task learning (MTL) to mitigate data scarcity by leveraging domain-specific information from related tasks. In this paper, we present a novel soft-parameter sharing mechanism for CNNs in a MTL setting, which we refer to as Deep Collaboration. We propose taking into account the notion that task relevance depends on depth by using lateral transformation blocs with skip connections. This allows extracting task-specific features at various depth without sacrificing features relevant to all tasks. We show that CNNs connected with our Deep Collaboration obtain better accuracy on facial landmark detection with related tasks. We finally verify that our approach effectively allows knowledge sharing by showing depth-specific influence of tasks that we know are related.
Parametric Exponential Linear Unit for Deep Convolutional Neural Networks
Jan 10, 2018



Object recognition is an important task for improving the ability of visual systems to perform complex scene understanding. Recently, the Exponential Linear Unit (ELU) has been proposed as a key component for managing bias shift in Convolutional Neural Networks (CNNs), but defines a parameter that must be set by hand. In this paper, we propose learning a parameterization of ELU in order to learn the proper activation shape at each layer in the CNNs. Our results on the MNIST, CIFAR-10/100 and ImageNet datasets using the NiN, Overfeat, All-CNN and ResNet networks indicate that our proposed Parametric ELU (PELU) has better performances than the non-parametric ELU. We have observed as much as a 7.28% relative error improvement on ImageNet with the NiN network, with only 0.0003% parameter increase. Our visual examination of the non-linear behaviors adopted by Vgg using PELU shows that the network took advantage of the added flexibility by learning different activations at different layers.
Dictionary Learning for Robotic Grasp Recognition and Detection
Jun 02, 2016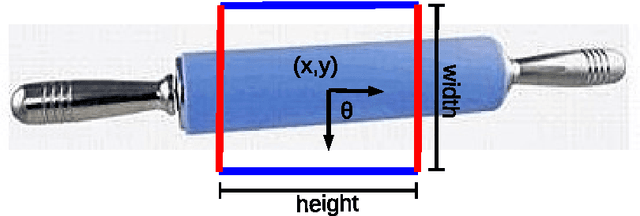


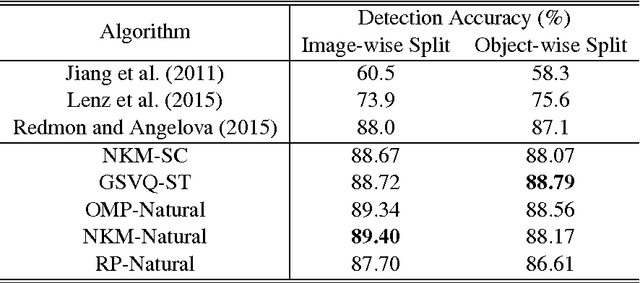
The ability to grasp ordinary and potentially never-seen objects is an important feature in both domestic and industrial robotics. For a system to accomplish this, it must autonomously identify grasping locations by using information from various sensors, such as Microsoft Kinect 3D camera. Despite numerous progress, significant work still remains to be done in this field. To this effect, we propose a dictionary learning and sparse representation (DLSR) framework for representing RGBD images from 3D sensors in the context of determining such good grasping locations. In contrast to previously proposed approaches that relied on sophisticated regularization or very large datasets, the derived perception system has a fast training phase and can work with small datasets. It is also theoretically founded for dealing with masked-out entries, which are common with 3D sensors. We contribute by presenting a comparative study of several DLSR approach combinations for recognizing and detecting grasp candidates on the standard Cornell dataset. Importantly, experimental results show a performance improvement of 1.69% in detection and 3.16% in recognition over current state-of-the-art convolutional neural network (CNN). Even though nowadays most popular vision-based approach is CNN, this suggests that DLSR is also a viable alternative with interesting advantages that CNN has not.