 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Adversarial Transferability via Information Bottleneck Constraints
Jun 08, 2024



From the perspective of information bottleneck (IB) theory, we propose a novel framework for performing black-box transferable adversarial attacks named IBTA, which leverages advancements in invariant features. Intuitively, diminishing the reliance of adversarial perturbations on the original data, under equivalent attack performance constraints, encourages a greater reliance on invariant features that contributes most to classification, thereby enhancing the transferability of adversarial attacks. Building on this motivation, we redefine the optimization of transferable attacks using a novel theoretical framework that centers around IB. Specifically, to overcome the challenge of unoptimizable mutual information, we propose a simple and efficient mutual information lower bound (MILB) for approximating computation. Moreover, to quantitatively evaluate mutual information, we utilize the Mutual Information Neural Estimator (MINE) to perform a thorough analysis. Our experiments on the ImageNet dataset well demonstrate the efficiency and scalability of IBTA and derived MILB. Our code is available at https://github.com/Biqing-Qi/Enhancing-Adversarial-Transferability-via-Information-Bottleneck-Constraints.
SMR: State Memory Replay for Long Sequence Modeling
May 27, 2024Despite the promising performance of state space models (SSMs) in long sequence modeling, limitations still exist. Advanced SSMs like S5 and S6 (Mamba) in addressing non-uniform sampling, their recursive structures impede efficient SSM computation via convolution. To overcome compatibility limitations in parallel convolutional computation, this paper proposes a novel non-recursive non-uniform sample processing strategy. Theoretical analysis of SSMs through the lens of Event-Triggered Control (ETC) theory reveals the Non-Stable State (NSS) problem, where deviations from sampling point requirements lead to error transmission and accumulation, causing the divergence of the SSM's hidden state. Our analysis further reveals that adjustments of input sequences with early memories can mitigate the NSS problem, achieving Sampling Step Adaptation (SSA). Building on this insight, we introduce a simple yet effective plug-and-play mechanism, State Memory Replay (SMR), which utilizes learnable memories to adjust the current state with multi-step information for generalization at sampling points different from those in the training data. This enables SSMs to stably model varying sampling points. Experiments on long-range modeling tasks in autoregressive language modeling and Long Range Arena demonstrate the general effectiveness of the SMR mechanism for a series of SSM models.
Contrastive Augmented Graph2Graph Memory Interaction for Few Shot Continual Learning
Mar 07, 2024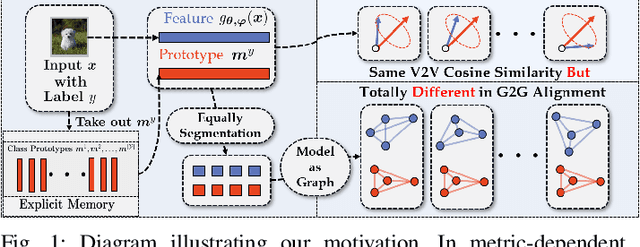
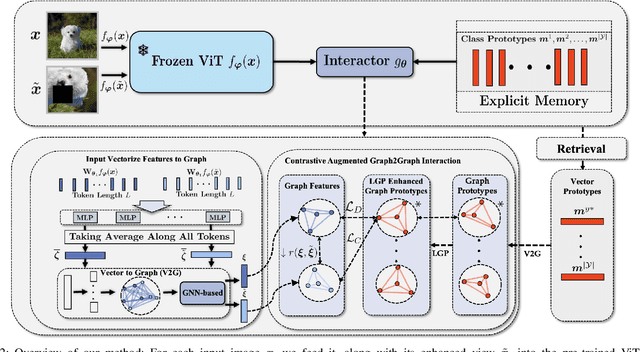
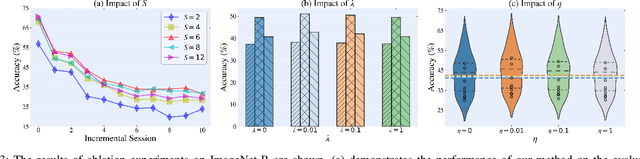
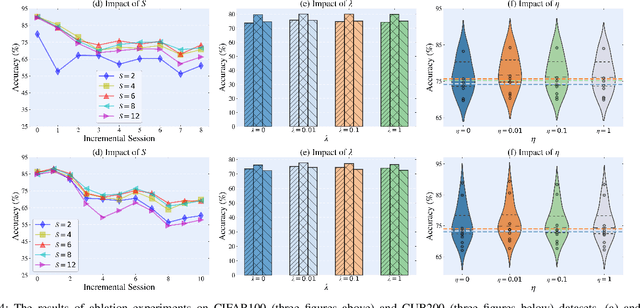
Few-Shot Class-Incremental Learning (FSCIL) has gained considerable attention in recent years for its pivotal role in addressing continuously arriving classes. However, it encounters additional challenges. The scarcity of samples in new sessions intensifies overfitting, causing incompatibility between the output features of new and old classes, thereby escalating catastrophic forgetting. A prevalent strategy involves mitigating catastrophic forgetting through the Explicit Memory (EM), which comprise of class prototypes. However, current EM-based methods retrieves memory globally by performing Vector-to-Vector (V2V) interaction between features corresponding to the input and prototypes stored in EM, neglecting the geometric structure of local features. This hinders the accurate modeling of their positional relationships. To incorporate information of local geometric structure, we extend the V2V interaction to Graph-to-Graph (G2G) interaction. For enhancing local structures for better G2G alignment and the prevention of local feature collapse, we propose the Local Graph Preservation (LGP) mechanism. Additionally, to address sample scarcity in classes from new sessions, the Contrast-Augmented G2G (CAG2G) is introduced to promote the aggregation of same class features thus helps few-shot learning. Extensive comparisons on CIFAR100, CUB200, and the challenging ImageNet-R dataset demonstrate the superiority of our method over existing methods.
Model-Free Load Frequency Control of Nonlinear Power Systems Based on Deep Reinforcement Learning
Mar 07, 2024

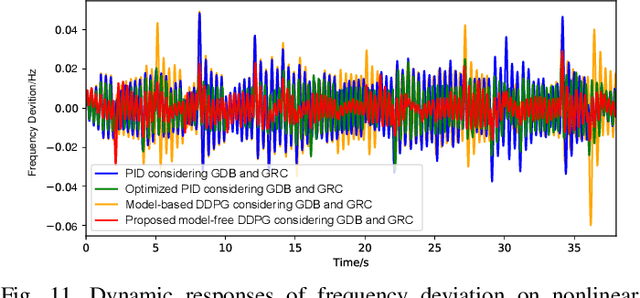

Load frequency control (LFC) is widely employed in power systems to stabilize frequency fluctuation and guarantee power quality. However, most existing LFC methods rely on accurate power system modeling and usually ignore the nonlinear characteristics of the system, limiting controllers' performance. To solve these problems, this paper proposes a model-free LFC method for nonlinear power systems based on deep deterministic policy gradient (DDPG) framework. The proposed method establishes an emulator network to emulate power system dynamics. After defining the action-value function, the emulator network is applied for control actions evaluation instead of the critic network. Then the actor network controller is effectively optimized by estimating the policy gradient based on zeroth-order optimization (ZOO) and backpropagation algorithm. Simulation results and corresponding comparisons demonstrate the designed controller can generate appropriate control actions and has strong adaptability for nonlinear power systems.
Interactive Continual Learning: Fast and Slow Thinking
Mar 05, 2024Advanced life forms, sustained by the synergistic interaction of neural cognitive mechanisms, continually acquire and transfer knowledge throughout their lifespan. In contrast, contemporary machine learning paradigms exhibit limitations in emulating the facets of continual learning (CL). Nonetheless, the emergence of large language models (LLMs) presents promising avenues for realizing CL via interactions with these models. Drawing on Complementary Learning System theory, this paper presents a novel Interactive Continual Learning (ICL) framework, enabled by collaborative interactions among models of various sizes. Specifically, we assign the ViT model as System1 and multimodal LLM as System2. To enable the memory module to deduce tasks from class information and enhance Set2Set retrieval, we propose the Class-Knowledge-Task Multi-Head Attention (CKT-MHA). Additionally, to improve memory retrieval in System1 through enhanced geometric representation, we introduce the CL-vMF mechanism, based on the von Mises-Fisher (vMF) distribution. Meanwhile, we introduce the von Mises-Fisher Outlier Detection and Interaction (vMF-ODI) strategy to identify hard examples, thus enhancing collaboration between System1 and System2 for complex reasoning realization. Comprehensive evaluation of our proposed ICL demonstrates significant resistance to forgetting and superior performance relative to existing methods.
Investigating Deep Watermark Security: An Adversarial Transferability Perspective
Feb 26, 2024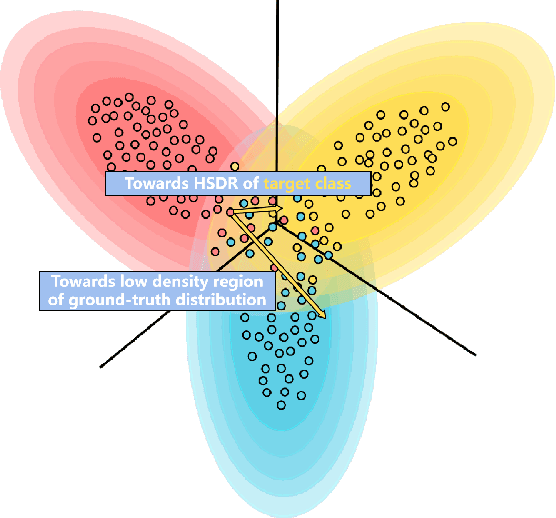
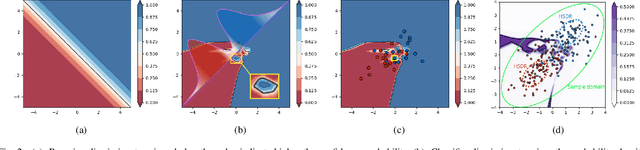

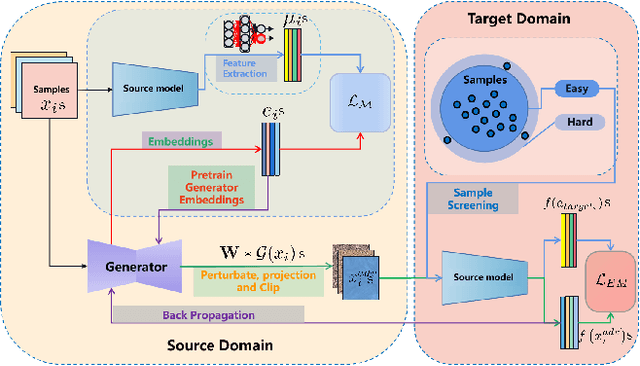
The rise of generative neural networks has triggered an increased demand for intellectual property (IP) protection in generated content. Deep watermarking techniques, recognized for their flexibility in IP protection, have garnered significant attention. However, the surge in adversarial transferable attacks poses unprecedented challenges to the security of deep watermarking techniques-an area currently lacking systematic investigation. This study fills this gap by introducing two effective transferable attackers to assess the vulnerability of deep watermarks against erasure and tampering risks. Specifically, we initially define the concept of local sample density, utilizing it to deduce theorems on the consistency of model outputs. Upon discovering that perturbing samples towards high sample density regions (HSDR) of the target class enhances targeted adversarial transferability, we propose the Easy Sample Selection (ESS) mechanism and the Easy Sample Matching Attack (ESMA) method. Additionally, we propose the Bottleneck Enhanced Mixup (BEM) that integrates information bottleneck theory to reduce the generator's dependence on irrelevant noise. Experiments show a significant enhancement in the success rate of targeted transfer attacks for both ESMA and BEM-ESMA methods. We further conduct a comprehensive evaluation using ESMA and BEM-ESMA as measurements, considering model architecture and watermark encoding length, and achieve some impressive findings.
On Deep Recurrent Reinforcement Learning for Active Visual Tracking of Space Noncooperative Objects
Dec 29, 2022Active tracking of space noncooperative object that merely relies on vision camera is greatly significant for autonomous rendezvous and debris removal. Considering its Partial Observable Markov Decision Process (POMDP) property, this paper proposes a novel tracker based on deep recurrent reinforcement learning, named as RAMAVT which drives the chasing spacecraft to follow arbitrary space noncooperative object with high-frequency and near-optimal velocity control commands. To further improve the active tracking performance, we introduce Multi-Head Attention (MHA) module and Squeeze-and-Excitation (SE) layer into RAMAVT, which remarkably improve the representative ability of neural network with almost no extra computational cost. Extensive experiments and ablation study implemented on SNCOAT benchmark show the effectiveness and robustness of our method compared with other state-of-the-art algorithm. The source codes are available on https://github.com/Dongzhou-1996/RAMAVT.