 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Chain of Behavior for User Trajectory Prediction
Jan 26, 2026Modeling long-term user behavior trajectories is essential for understanding evolving preferences and enabling proactive recommendations. However, most sequential recommenders focus on next-item prediction, overlooking dependencies across multiple future actions. We propose Generative Chain of Behavior (GCB), a generative framework that models user interactions as an autoregressive chain of semantic behaviors over multiple future steps. GCB first encodes items into semantic IDs via RQ-VAE with k-means refinement, forming a discrete latent space that preserves semantic proximity. On top of this space, a transformer-based autoregressive generator predicts multi-step future behaviors conditioned on user history, capturing long-horizon intent transitions and generating coherent trajectories. Experiments on benchmark datasets show that GCB consistently outperforms state-of-the-art sequential recommenders in multi-step accuracy and trajectory consistency. Beyond these gains, GCB offers a unified generative formulation for capturing user preference evolution.
Model-Free Load Frequency Control of Nonlinear Power Systems Based on Deep Reinforcement Learning
Mar 07, 2024

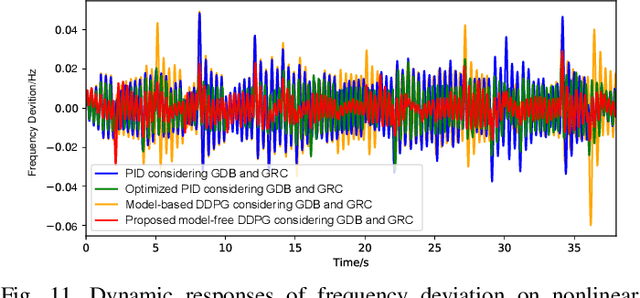

Load frequency control (LFC) is widely employed in power systems to stabilize frequency fluctuation and guarantee power quality. However, most existing LFC methods rely on accurate power system modeling and usually ignore the nonlinear characteristics of the system, limiting controllers' performance. To solve these problems, this paper proposes a model-free LFC method for nonlinear power systems based on deep deterministic policy gradient (DDPG) framework. The proposed method establishes an emulator network to emulate power system dynamics. After defining the action-value function, the emulator network is applied for control actions evaluation instead of the critic network. Then the actor network controller is effectively optimized by estimating the policy gradient based on zeroth-order optimization (ZOO) and backpropagation algorithm. Simulation results and corresponding comparisons demonstrate the designed controller can generate appropriate control actions and has strong adaptability for nonlinear power systems.