 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXuanCe: A Comprehensive and Unified Deep Reinforcement Learning Library
Dec 25, 2023In this paper, we present XuanCe, a comprehensive and unified deep reinforcement learning (DRL) library designed to be compatible with PyTorch, TensorFlow, and MindSpore. XuanCe offers a wide range of functionalities, including over 40 classical DRL and multi-agent DRL algorithms, with the flexibility to easily incorporate new algorithms and environments. It is a versatile DRL library that supports CPU, GPU, and Ascend, and can be executed on various operating systems such as Ubuntu, Windows, MacOS, and EulerOS. Extensive benchmarks conducted on popular environments including MuJoCo, Atari, and StarCraftII multi-agent challenge demonstrate the library's impressive performance. XuanCe is open-source and can be accessed at https://github.com/agi-brain/xuance.git.
DGMem: Learning Visual Navigation Policy without Any Labels by Dynamic Graph Memory
Nov 30, 2023In recent years, learning-based approaches have demonstrated significant promise in addressing intricate navigation tasks. Traditional methods for training deep neural network navigation policies rely on meticulously designed reward functions or extensive teleoperation datasets as navigation demonstrations. However, the former is often confined to simulated environments, and the latter demands substantial human labor, making it a time-consuming process. Our vision is for robots to autonomously learn navigation skills and adapt their behaviors to environmental changes without any human intervention. In this work, we discuss the self-supervised navigation problem and present Dynamic Graph Memory (DGMem), which facilitates training only with on-board observations. With the help of DGMem, agents can actively explore their surroundings, autonomously acquiring a comprehensive navigation policy in a data-efficient manner without external feedback. Our method is evaluated in photorealistic 3D indoor scenes, and empirical studies demonstrate the effectiveness of DGMem.
TransMatting: Tri-token Equipped Transformer Model for Image Matting
Mar 11, 2023



Image matting aims to predict alpha values of elaborate uncertainty areas of natural images, like hairs, smoke, and spider web. However, existing methods perform poorly when faced with highly transparent foreground objects due to the large area of uncertainty to predict and the small receptive field of convolutional networks. To address this issue, we propose a Transformer-based network (TransMatting) to model transparent objects with long-range features and collect a high-resolution matting dataset of transparent objects (Transparent-460) for performance evaluation. Specifically, to utilize semantic information in the trimap flexibly and effectively, we also redesign the trimap as three learnable tokens, named tri-token. Both Transformer and convolution matting models could benefit from our proposed tri-token design. By replacing the traditional trimap concatenation strategy with our tri-token, existing matting methods could achieve about 10% improvement in SAD and 20% in MSE. Equipped with the new tri-token design, our proposed TransMatting outperforms current state-of-the-art methods on several popular matting benchmarks and our newly collected Transparent-460.
TransMatting: Enhancing Transparent Objects Matting with Transformers
Aug 05, 2022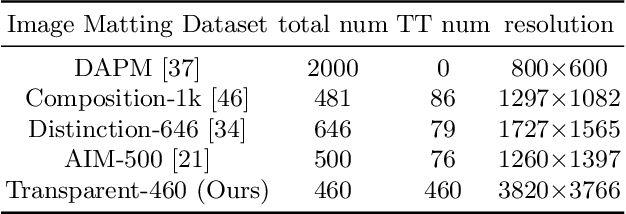
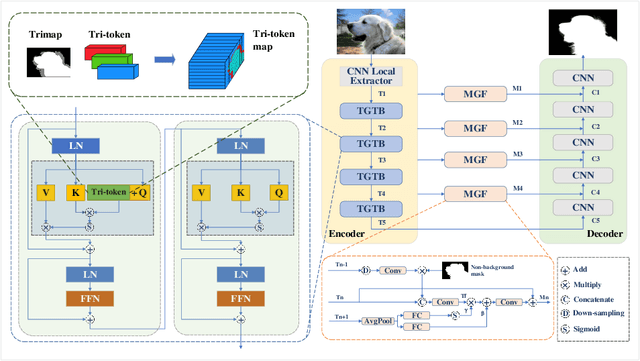
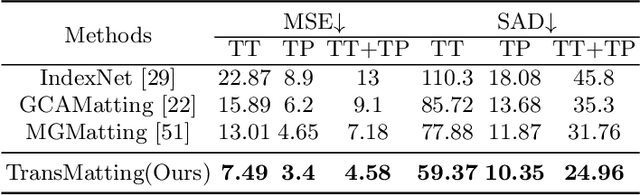
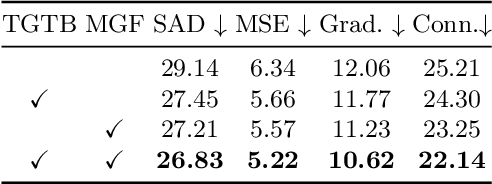
Image matting refers to predicting the alpha values of unknown foreground areas from natural images. Prior methods have focused on propagating alpha values from known to unknown regions. However, not all natural images have a specifically known foreground. Images of transparent objects, like glass, smoke, web, etc., have less or no known foreground. In this paper, we propose a Transformer-based network, TransMatting, to model transparent objects with a big receptive field. Specifically, we redesign the trimap as three learnable tri-tokens for introducing advanced semantic features into the self-attention mechanism. A small convolutional network is proposed to utilize the global feature and non-background mask to guide the multi-scale feature propagation from encoder to decoder for maintaining the contexture of transparent objects. In addition, we create a high-resolution matting dataset of transparent objects with small known foreground areas. Experiments on several matting benchmarks demonstrate the superiority of our proposed method over the current state-of-the-art methods.