 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReusing Attention for One-stage Lane Topology Understanding
Jul 23, 2025Understanding lane toplogy relationships accurately is critical for safe autonomous driving. However, existing two-stage methods suffer from inefficiencies due to error propagations and increased computational overheads. To address these challenges, we propose a one-stage architecture that simultaneously predicts traffic elements, lane centerlines and topology relationship, improving both the accuracy and inference speed of lane topology understanding for autonomous driving. Our key innovation lies in reusing intermediate attention resources within distinct transformer decoders. This approach effectively leverages the inherent relational knowledge within the element detection module to enable the modeling of topology relationships among traffic elements and lanes without requiring additional computationally expensive graph networks. Furthermore, we are the first to demonstrate that knowledge can be distilled from models that utilize standard definition (SD) maps to those operates without using SD maps, enabling superior performance even in the absence of SD maps. Extensive experiments on the OpenLane-V2 dataset show that our approach outperforms baseline methods in both accuracy and efficiency, achieving superior results in lane detection, traffic element identification, and topology reasoning. Our code is available at https://github.com/Yang-Li-2000/one-stage.git.
Impromptu VLA: Open Weights and Open Data for Driving Vision-Language-Action Models
May 29, 2025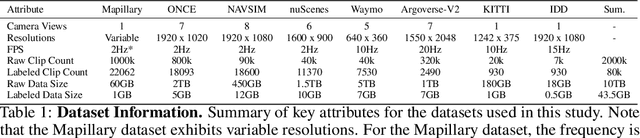
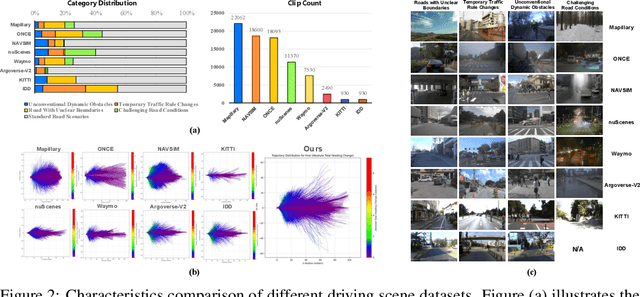
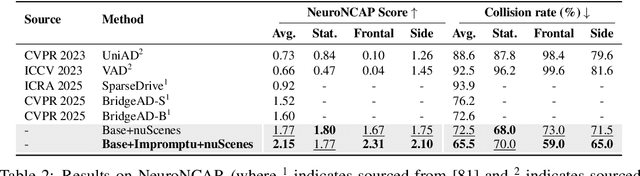
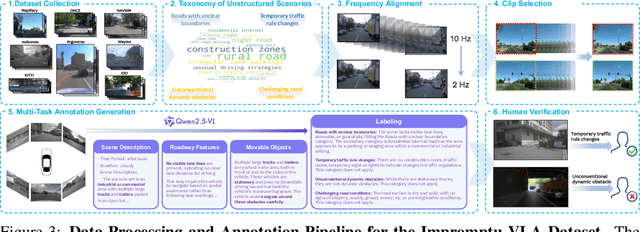
Vision-Language-Action (VLA) models for autonomous driving show promise but falter in unstructured corner case scenarios, largely due to a scarcity of targeted benchmarks. To address this, we introduce Impromptu VLA. Our core contribution is the Impromptu VLA Dataset: over 80,000 meticulously curated video clips, distilled from over 2M source clips sourced from 8 open-source large-scale datasets. This dataset is built upon our novel taxonomy of four challenging unstructured categories and features rich, planning-oriented question-answering annotations and action trajectories. Crucially, experiments demonstrate that VLAs trained with our dataset achieve substantial performance gains on established benchmarks--improving closed-loop NeuroNCAP scores and collision rates, and reaching near state-of-the-art L2 accuracy in open-loop nuScenes trajectory prediction. Furthermore, our Q&A suite serves as an effective diagnostic, revealing clear VLM improvements in perception, prediction, and planning. Our code, data and models are available at https://github.com/ahydchh/Impromptu-VLA.
Control Map Distribution using Map Query Bank for Online Map Generation
Apr 04, 2025Reliable autonomous driving systems require high-definition (HD) map that contains detailed map information for planning and navigation. However, pre-build HD map requires a large cost. Visual-based Online Map Generation (OMG) has become an alternative low-cost solution to build a local HD map. Query-based BEV Transformer has been a base model for this task. This model learns HD map predictions from an initial map queries distribution which is obtained by offline optimization on training set. Besides the quality of BEV feature, the performance of this model also highly relies on the capacity of initial map query distribution. However, this distribution is limited because the limited query number. To make map predictions optimal on each test sample, it is essential to generate a suitable initial distribution for each specific scenario. This paper proposes to decompose the whole HD map distribution into a set of point representations, namely map query bank (MQBank). To build specific map query initial distributions of different scenarios, low-cost standard definition map (SD map) data is introduced as a kind of prior knowledge. Moreover, each layer of map decoder network learns instance-level map query features, which will lose detailed information of each point. However, BEV feature map is a point-level dense feature. It is important to keep point-level information in map queries when interacting with BEV feature map. This can also be solved with map query bank method. Final experiments show a new insight on SD map prior and a new record on OpenLaneV2 benchmark with 40.5%, 45.7% mAP on vehicle lane and pedestrian area.
Chameleon: Fast-slow Neuro-symbolic Lane Topology Extraction
Mar 10, 2025Lane topology extraction involves detecting lanes and traffic elements and determining their relationships, a key perception task for mapless autonomous driving. This task requires complex reasoning, such as determining whether it is possible to turn left into a specific lane. To address this challenge, we introduce neuro-symbolic methods powered by vision-language foundation models (VLMs). Existing approaches have notable limitations: (1) Dense visual prompting with VLMs can achieve strong performance but is costly in terms of both financial resources and carbon footprint, making it impractical for robotics applications. (2) Neuro-symbolic reasoning methods for 3D scene understanding fail to integrate visual inputs when synthesizing programs, making them ineffective in handling complex corner cases. To this end, we propose a fast-slow neuro-symbolic lane topology extraction algorithm, named Chameleon, which alternates between a fast system that directly reasons over detected instances using synthesized programs and a slow system that utilizes a VLM with a chain-of-thought design to handle corner cases. Chameleon leverages the strengths of both approaches, providing an affordable solution while maintaining high performance. We evaluate the method on the OpenLane-V2 dataset, showing consistent improvements across various baseline detectors. Our code, data, and models are publicly available at https://github.com/XR-Lee/neural-symbolic