 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive learning to address nonstationarity in virtual flow metering applications
Feb 07, 2022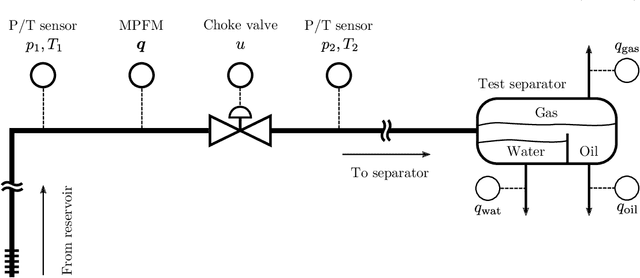
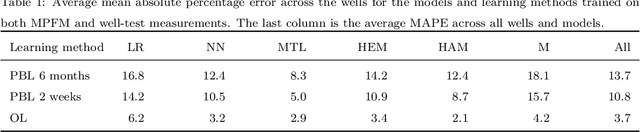

Steady-state process models are common in virtual flow meter applications due to low computational complexity, and low model development and maintenance cost. Nevertheless, the prediction performance of steady-state models typically degrades with time due to the inherent nonstationarity of the underlying process being modeled. Few studies have investigated how learning methods can be applied to sustain the prediction accuracy of steady-state virtual flow meters. This paper explores passive learning, where the model is frequently calibrated to new data, as a way to address nonstationarity and improve long-term performance. An advantage with passive learning is that it is compatible with models used in the industry. Two passive learning methods, periodic batch learning and online learning, are applied with varying calibration frequency to train virtual flow meters. Six different model types, ranging from data-driven to first-principles, are trained on historical production data from 10 petroleum wells. The results are two-fold: first, in the presence of frequently arriving measurements, frequent model updating sustains an excellent prediction performance over time; second, in the presence of intermittent and infrequently arriving measurements, frequent updating in addition to the utilization of expert knowledge is essential to increase the performance accuracy. The investigation may be of interest to experts developing soft-sensors for nonstationary processes, such as virtual flow meters.
On gray-box modeling for virtual flow metering
Mar 23, 2021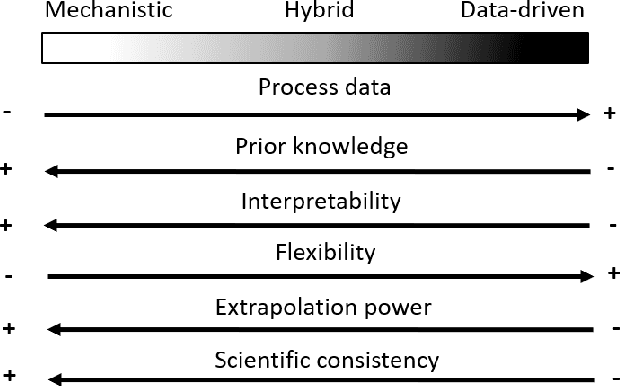
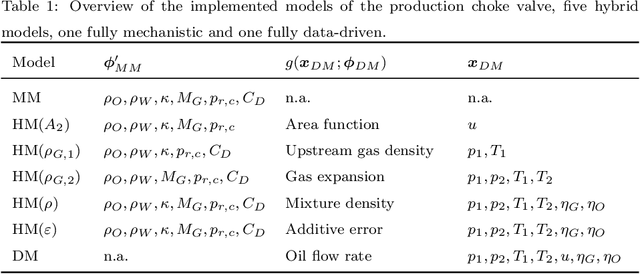
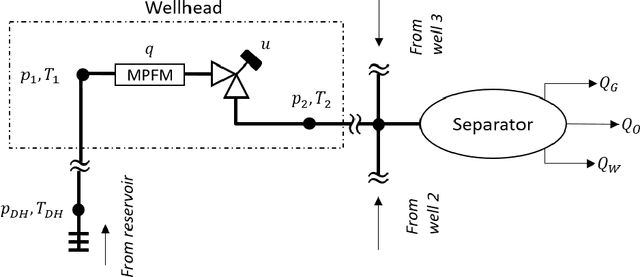
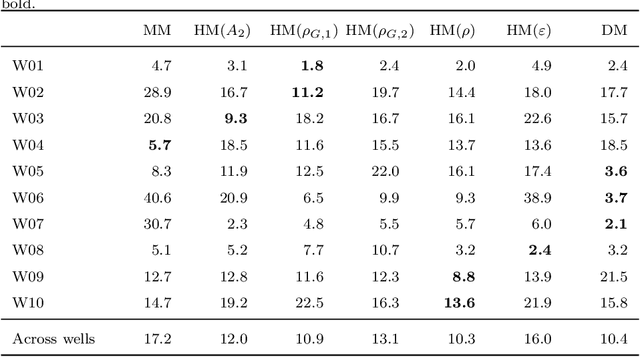
A virtual flow meter (VFM) enables continuous prediction of flow rates in petroleum production systems. The predicted flow rates may aid the daily control and optimization of a petroleum asset. Gray-box modeling is an approach that combines mechanistic and data-driven modeling. The objective is to create a VFM with higher accuracy than a mechanistic VFM, and with a higher scientific consistency than a data-driven VFM. This article investigates five different gray-box model types in an industrial case study on 10 petroleum wells. The study casts light upon the nontrivial task of balancing learning from physics and data. The results indicate that the inclusion of data-driven elements in a mechanistic model improves the predictive performance of the model while insignificantly influencing the scientific consistency. However, the results are influenced by the available data. The findings encourage future research into online learning and the utilization of methods that incorporate data from several wells.
Adaptation of Engineering Wake Models using Gaussian Process Regression and High-Fidelity Simulation Data
Mar 30, 2020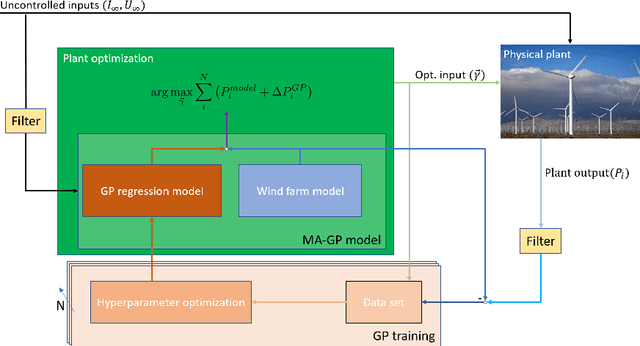
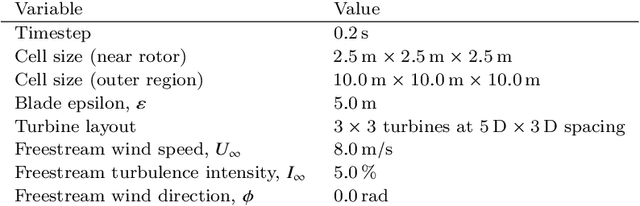
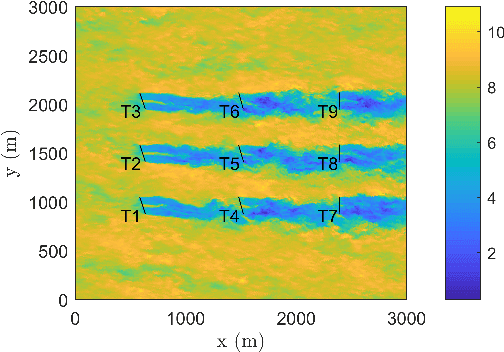
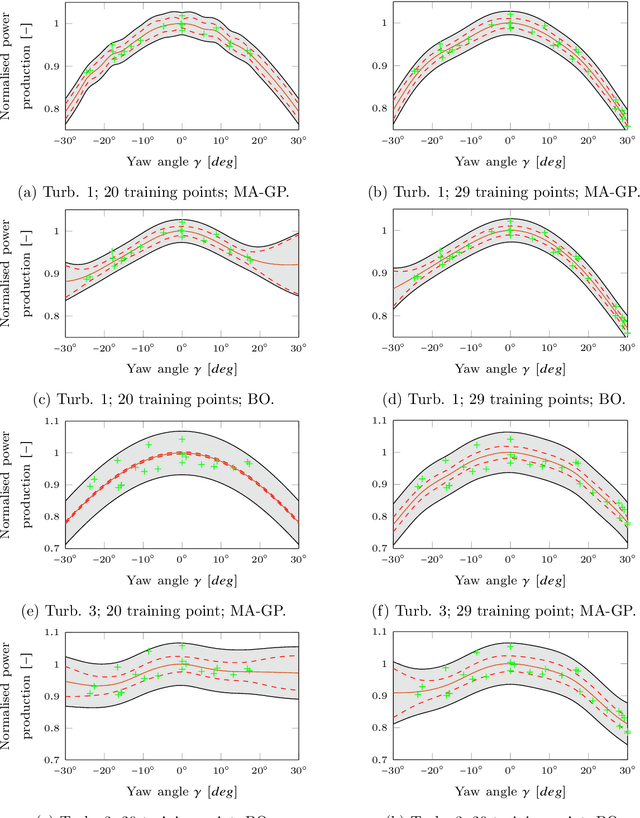
This article investigates the optimization of yaw control inputs of a nine-turbine wind farm. The wind farm is simulated using the high-fidelity simulator SOWFA. The optimization is performed with a modifier adaptation scheme based on Gaussian processes. Modifier adaptation corrects for the mismatch between plant and model and helps to converge to the actual plan optimum. In the case study the modifier adaptation approach is compared with the Bayesian optimization approach. Moreover, the use of two different covariance functions in the Gaussian process regression is discussed. Practical recommendations concerning the data preparation and application of the approach are given. It is shown that both the modifier adaptation and the Bayesian optimization approach can improve the power production with overall smaller yaw misalignments in comparison to the Gaussian wake model.
Developing a Hybrid Data-Driven, Mechanistic Virtual Flow Meter -- a Case Study
Feb 07, 2020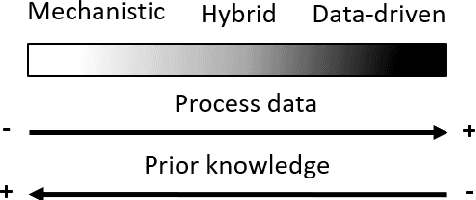
Virtual flow meters, mathematical models predicting production flow rates in petroleum assets, are useful aids in production monitoring and optimization. Mechanistic models based on first-principles are most common, however, data-driven models exploiting patterns in measurements are gaining popularity. This research investigates a hybrid modeling approach, utilizing techniques from both the aforementioned areas of expertise, to model a well production choke. The choke is represented with a simplified set of first-principle equations and a neural network to estimate the valve flow coefficient. Historical production data from the petroleum platform Edvard Grieg is used for model validation. Additionally, a mechanistic and a data-driven model are constructed for comparison of performance. A practical framework for development of models with varying degree of hybridity and stochastic optimization of its parameters is established. Results of the hybrid model performance are promising albeit with considerable room for improvements.
Stochastic data-driven model predictive control using Gaussian processes
Aug 05, 2019
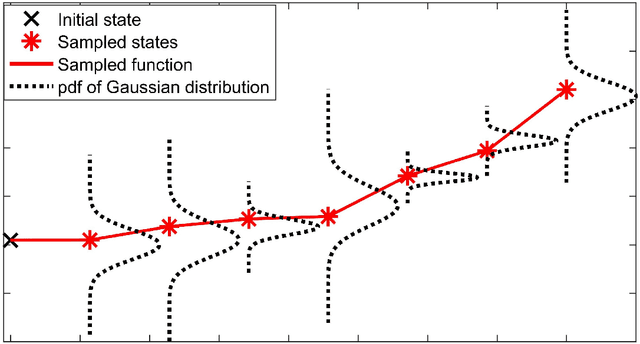
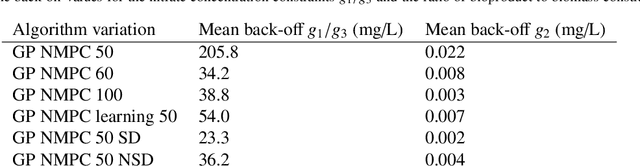
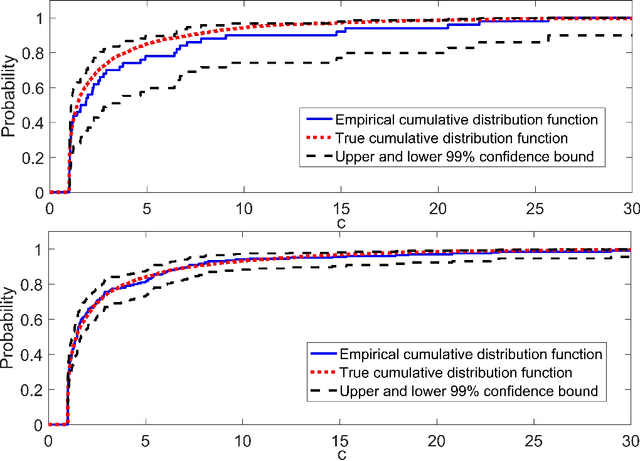
Nonlinear model predictive control (NMPC) is one of the few control methods that can handle multivariable nonlinear control systems with constraints. Gaussian processes (GPs) present a powerful tool to identify the required plant model and quantify the residual uncertainty of the plant-model mismatch given its probabilistic nature . It is crucial to account for this uncertainty, since it may lead to worse control performance and constraint violations. In this paper we propose a new method to design a GP-based NMPC algorithm for finite horizon control problems. The method generates Monte Carlo samples of the GP offline for constraint tightening using back-offs. The tightened constraints then guarantee the satisfaction of joint chance constraints online. Advantages of our proposed approach over existing methods include fast online evaluation time, consideration of closed-loop behaviour, and the possibility to alleviate conservativeness by accounting for both online learning and state dependency of the uncertainty. The algorithm is verified on a challenging semi-batch bioprocess case study, with its high performance thoroughly demonstrated.