 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Algorithm Collaborative Bayesian Optimization for Engineering Systems
Apr 16, 2024Bayesian optimization has been successfully applied throughout Chemical Engineering for the optimization of functions that are expensive-to-evaluate, or where gradients are not easily obtainable. However, domain experts often possess valuable physical insights that are overlooked in fully automated decision-making approaches, necessitating the inclusion of human input. In this article we re-introduce the human back into the data-driven decision making loop by outlining an approach for collaborative Bayesian optimization. Our methodology exploits the hypothesis that humans are more efficient at making discrete choices rather than continuous ones and enables experts to influence critical early decisions. We apply high-throughput (batch) Bayesian optimization alongside discrete decision theory to enable domain experts to influence the selection of experiments. At every iteration we apply a multi-objective approach that results in a set of alternate solutions that have both high utility and are reasonably distinct. The expert then selects the desired solution for evaluation from this set, allowing for the inclusion of expert knowledge and improving accountability, whilst maintaining the advantages of Bayesian optimization. We demonstrate our approach across a number of applied and numerical case studies including bioprocess optimization and reactor geometry design, demonstrating that even in the case of an uninformed practitioner our algorithm recovers the regret of standard Bayesian optimization. Through the inclusion of continuous expert opinion, our approach enables faster convergence, and improved accountability for Bayesian optimization in engineering systems.
Expert-guided Bayesian Optimisation for Human-in-the-loop Experimental Design of Known Systems
Dec 05, 2023Domain experts often possess valuable physical insights that are overlooked in fully automated decision-making processes such as Bayesian optimisation. In this article we apply high-throughput (batch) Bayesian optimisation alongside anthropological decision theory to enable domain experts to influence the selection of optimal experiments. Our methodology exploits the hypothesis that humans are better at making discrete choices than continuous ones and enables experts to influence critical early decisions. At each iteration we solve an augmented multi-objective optimisation problem across a number of alternate solutions, maximising both the sum of their utility function values and the determinant of their covariance matrix, equivalent to their total variability. By taking the solution at the knee point of the Pareto front, we return a set of alternate solutions at each iteration that have both high utility values and are reasonably distinct, from which the expert selects one for evaluation. We demonstrate that even in the case of an uninformed practitioner, our algorithm recovers the regret of standard Bayesian optimisation.
Machine Learning-Assisted Discovery of Novel Reactor Designs via CFD-Coupled Multi-fidelity Bayesian Optimisation
Aug 17, 2023Additive manufacturing has enabled the production of more advanced reactor geometries, resulting in the potential for significantly larger and more complex design spaces. Identifying and optimising promising configurations within broader design spaces presents a significant challenge for existing human-centric design approaches. As such, existing parameterisations of coiled-tube reactor geometries are low-dimensional with expensive optimisation limiting more complex solutions. Given algorithmic improvements and the onset of additive manufacturing, we propose two novel coiled-tube parameterisations enabling the variation of cross-section and coil path, resulting in a series of high dimensional, complex optimisation problems. To ensure tractable, non-local optimisation where gradients are not available, we apply multi-fidelity Bayesian optimisation. Our approach characterises multiple continuous fidelities and is coupled with parameterised meshing and simulation, enabling lower quality, but faster simulations to be exploited throughout optimisation. Through maximising the plug-flow performance, we identify key characteristics of optimal reactor designs, and extrapolate these to produce two novel geometries that we 3D print and experimentally validate. By demonstrating the design, optimisation, and manufacture of highly parameterised reactors, we seek to establish a framework for the next-generation of reactors, demonstrating that intelligent design coupled with new manufacturing processes can significantly improve the performance and sustainability of future chemical processes.
Design and Planning of Flexible Mobile Micro-Grids Using Deep Reinforcement Learning
Dec 08, 2022



Ongoing risks from climate change have impacted the livelihood of global nomadic communities, and are likely to lead to increased migratory movements in coming years. As a result, mobility considerations are becoming increasingly important in energy systems planning, particularly to achieve energy access in developing countries. Advanced Plug and Play control strategies have been recently developed with such a decentralized framework in mind, more easily allowing for the interconnection of nomadic communities, both to each other and to the main grid. In light of the above, the design and planning strategy of a mobile multi-energy supply system for a nomadic community is investigated in this work. Motivated by the scale and dimensionality of the associated uncertainties, impacting all major design and decision variables over the 30-year planning horizon, Deep Reinforcement Learning (DRL) is implemented for the design and planning problem tackled. DRL based solutions are benchmarked against several rigid baseline design options to compare expected performance under uncertainty. The results on a case study for ger communities in Mongolia suggest that mobile nomadic energy systems can be both technically and economically feasible, particularly when considering flexibility, although the degree of spatial dispersion among households is an important limiting factor. Key economic, sustainability and resilience indicators such as Cost, Equivalent Emissions and Total Unmet Load are measured, suggesting potential improvements compared to available baselines of up to 25%, 67% and 76%, respectively. Finally, the decomposition of values of flexibility and plug and play operation is presented using a variation of real options theory, with important implications for both nomadic communities and policymakers focused on enabling their energy access.
Stochastic data-driven model predictive control using Gaussian processes
Aug 05, 2019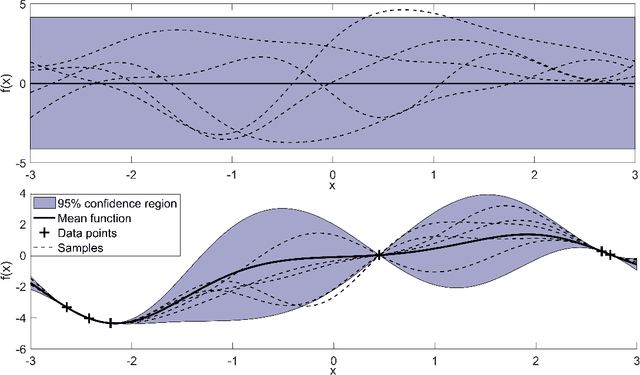
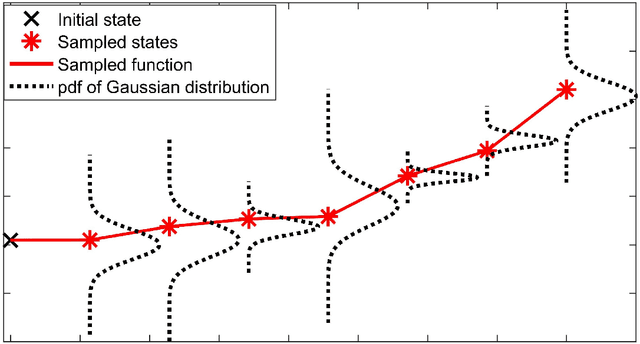
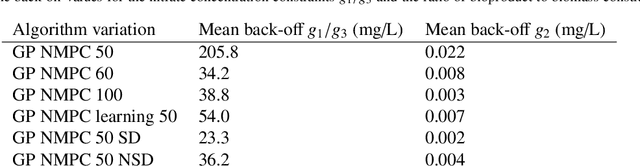
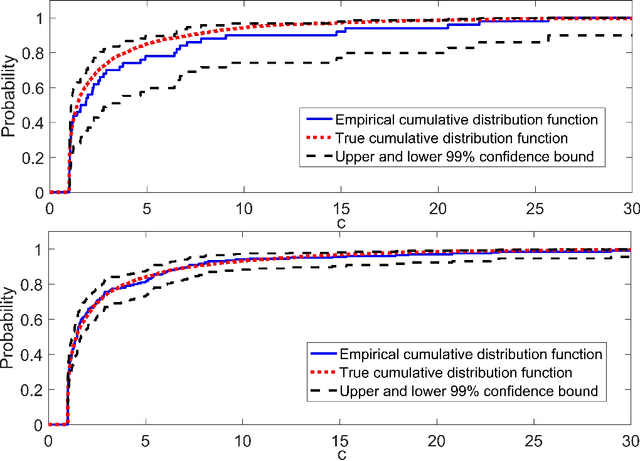
Nonlinear model predictive control (NMPC) is one of the few control methods that can handle multivariable nonlinear control systems with constraints. Gaussian processes (GPs) present a powerful tool to identify the required plant model and quantify the residual uncertainty of the plant-model mismatch given its probabilistic nature . It is crucial to account for this uncertainty, since it may lead to worse control performance and constraint violations. In this paper we propose a new method to design a GP-based NMPC algorithm for finite horizon control problems. The method generates Monte Carlo samples of the GP offline for constraint tightening using back-offs. The tightened constraints then guarantee the satisfaction of joint chance constraints online. Advantages of our proposed approach over existing methods include fast online evaluation time, consideration of closed-loop behaviour, and the possibility to alleviate conservativeness by accounting for both online learning and state dependency of the uncertainty. The algorithm is verified on a challenging semi-batch bioprocess case study, with its high performance thoroughly demonstrated.