 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajFlow: Multi-modal Motion Prediction via Flow Matching
Jun 10, 2025Efficient and accurate motion prediction is crucial for ensuring safety and informed decision-making in autonomous driving, particularly under dynamic real-world conditions that necessitate multi-modal forecasts. We introduce TrajFlow, a novel flow matching-based motion prediction framework that addresses the scalability and efficiency challenges of existing generative trajectory prediction methods. Unlike conventional generative approaches that employ i.i.d. sampling and require multiple inference passes to capture diverse outcomes, TrajFlow predicts multiple plausible future trajectories in a single pass, significantly reducing computational overhead while maintaining coherence across predictions. Moreover, we propose a ranking loss based on the Plackett-Luce distribution to improve uncertainty estimation of predicted trajectories. Additionally, we design a self-conditioning training technique that reuses the model's own predictions to construct noisy inputs during a second forward pass, thereby improving generalization and accelerating inference. Extensive experiments on the large-scale Waymo Open Motion Dataset (WOMD) demonstrate that TrajFlow achieves state-of-the-art performance across various key metrics, underscoring its effectiveness for safety-critical autonomous driving applications. The code and other details are available on the project website https://traj-flow.github.io/.
Rank and Align: Towards Effective Source-free Graph Domain Adaptation
Aug 22, 2024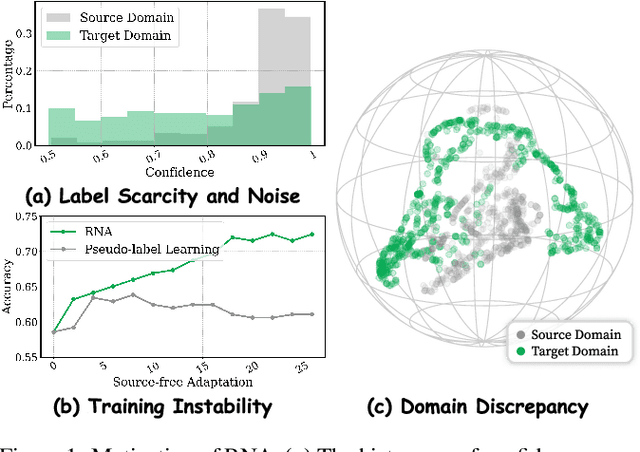


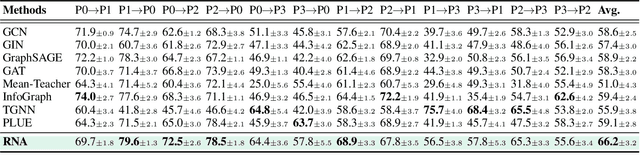
Graph neural networks (GNNs) have achieved impressive performance in graph domain adaptation. However, extensive source graphs could be unavailable in real-world scenarios due to privacy and storage concerns. To this end, we investigate an underexplored yet practical problem of source-free graph domain adaptation, which transfers knowledge from source models instead of source graphs to a target domain. To solve this problem, we introduce a novel GNN-based approach called Rank and Align (RNA), which ranks graph similarities with spectral seriation for robust semantics learning, and aligns inharmonic graphs with harmonic graphs which close to the source domain for subgraph extraction. In particular, to overcome label scarcity, we employ the spectral seriation algorithm to infer the robust pairwise rankings, which can guide semantic learning using a similarity learning objective. To depict distribution shifts, we utilize spectral clustering and the silhouette coefficient to detect harmonic graphs, which the source model can easily classify. To reduce potential domain discrepancy, we extract domain-invariant subgraphs from inharmonic graphs by an adversarial edge sampling process, which guides the invariant learning of GNNs. Extensive experiments on several benchmark datasets demonstrate the effectiveness of our proposed RNA.
Radar Camera Fusion via Representation Learning in Autonomous Driving
Mar 14, 2021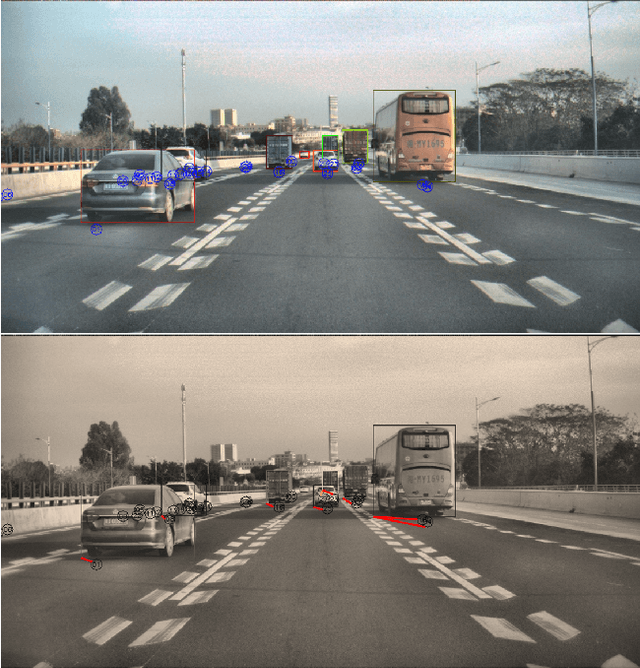



Radars and cameras are mature, cost-effective, and robust sensors and have been widely used in the perception stack of mass-produced autonomous driving systems. Due to their complementary properties, outputs from radar detection (radar pins) and camera perception (2D bounding boxes) are usually fused to generate the best perception results. The key to successful radar-camera fusion is accurate data association. The challenges in radar-camera association can be attributed to the complexity of driving scenes, the noisy and sparse nature of radar measurements, and the depth ambiguity from 2D bounding boxes. Traditional rule-based association methods are susceptible to performance degradation in challenging scenarios and failure in corner cases. In this study, we propose to address rad-cam association via deep representation learning, to explore feature-level interaction and global reasoning. Concretely, we design a loss sampling mechanism and an innovative ordinal loss to overcome the difficulty of imperfect labeling and to enforce critical human reasoning. Despite being trained with noisy labels generated by a rule-based algorithm, our proposed method achieves a performance of 92.2% F1 score, which is 11.6% higher than the rule-based teacher. Moreover, this data-driven method also lends itself to continuous improvement via corner case mining.
Probabilistic Oriented Object Detection in Automotive Radar
Apr 18, 2020

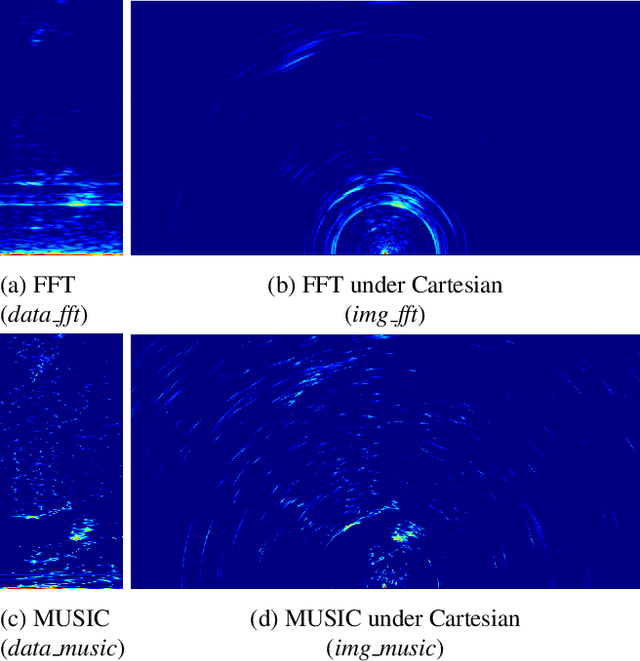

Autonomous radar has been an integral part of advanced driver assistance systems due to its robustness to adverse weather and various lighting conditions. Conventional automotive radars use digital signal processing (DSP) algorithms to process raw data into sparse radar pins that do not provide information regarding the size and orientation of the objects. In this paper, we propose a deep-learning based algorithm for radar object detection. The algorithm takes in radar data in its raw tensor representation and places probabilistic oriented bounding boxes around the detected objects in bird's-eye-view space. We created a new multimodal dataset with 102544 frames of raw radar and synchronized LiDAR data. To reduce human annotation effort we developed a scalable pipeline to automatically annotate ground truth using LiDAR as reference. Based on this dataset we developed a vehicle detection pipeline using raw radar data as the only input. Our best performing radar detection model achieves 77.28\% AP under oriented IoU of 0.3. To the best of our knowledge, this is the first attempt to investigate object detection with raw radar data for conventional corner automotive radars.