 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar Camera Fusion via Representation Learning in Autonomous Driving
Paper and Code
Mar 14, 2021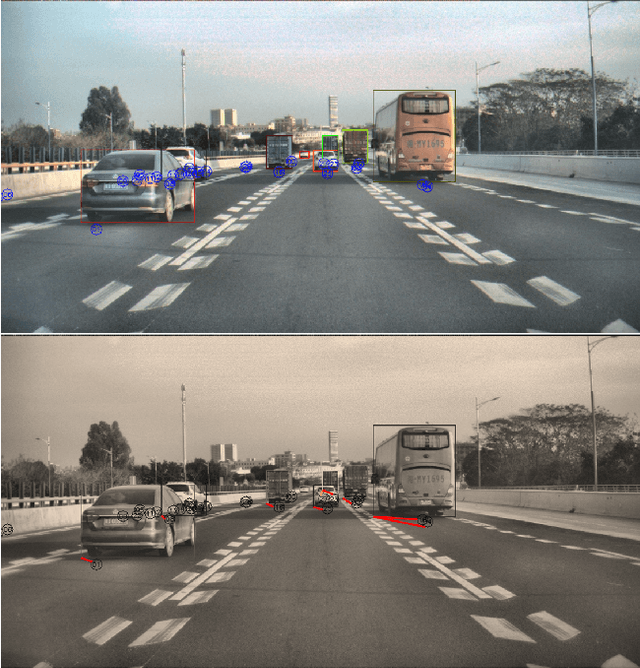



Radars and cameras are mature, cost-effective, and robust sensors and have been widely used in the perception stack of mass-produced autonomous driving systems. Due to their complementary properties, outputs from radar detection (radar pins) and camera perception (2D bounding boxes) are usually fused to generate the best perception results. The key to successful radar-camera fusion is accurate data association. The challenges in radar-camera association can be attributed to the complexity of driving scenes, the noisy and sparse nature of radar measurements, and the depth ambiguity from 2D bounding boxes. Traditional rule-based association methods are susceptible to performance degradation in challenging scenarios and failure in corner cases. In this study, we propose to address rad-cam association via deep representation learning, to explore feature-level interaction and global reasoning. Concretely, we design a loss sampling mechanism and an innovative ordinal loss to overcome the difficulty of imperfect labeling and to enforce critical human reasoning. Despite being trained with noisy labels generated by a rule-based algorithm, our proposed method achieves a performance of 92.2% F1 score, which is 11.6% higher than the rule-based teacher. Moreover, this data-driven method also lends itself to continuous improvement via corner case mining.