 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCost-Matching Model Predictive Control for Efficient Reinforcement Learning in Humanoid Locomotion
Mar 30, 2026In this paper, we propose a cost-matching approach for optimal humanoid locomotion within a Model Predictive Control (MPC)-based Reinforcement Learning (RL) framework. A parameterized MPC formulation with centroidal dynamics is trained to approximate the action-value function obtained from high-fidelity closed-loop data. Specifically, the MPC cost-to-go is evaluated along recorded state-action trajectories, and the parameters are updated to minimize the discrepancy between MPC-predicted values and measured returns. This formulation enables efficient gradient-based learning while avoiding the computational burden of repeatedly solving the MPC problem during training. The proposed method is validated in simulation using a commercial humanoid platform. Results demonstrate improved locomotion performance and robustness to model mismatch and external disturbances compared with manually tuned baselines.
A Physics-Informed Learning Framework to Solve the Infinite-Horizon Optimal Control Problem
May 28, 2025We propose a physics-informed neural networks (PINNs) framework to solve the infinite-horizon optimal control problem of nonlinear systems. In particular, since PINNs are generally able to solve a class of partial differential equations (PDEs), they can be employed to learn the value function of the infinite-horizon optimal control problem via solving the associated steady-state Hamilton-Jacobi-Bellman (HJB) equation. However, an issue here is that the steady-state HJB equation generally yields multiple solutions; hence if PINNs are directly employed to it, they may end up approximating a solution that is different from the optimal value function of the problem. We tackle this by instead applying PINNs to a finite-horizon variant of the steady-state HJB that has a unique solution, and which uniformly approximates the optimal value function as the horizon increases. An algorithm to verify if the chosen horizon is large enough is also given, as well as a method to extend it -- with reduced computations and robustness to approximation errors -- in case it is not. Unlike many existing methods, the proposed technique works well with non-polynomial basis functions, does not require prior knowledge of a stabilizing controller, and does not perform iterative policy evaluations. Simulations are performed, which verify and clarify theoretical findings.
A comprehensive survey of research towards AI-enabled unmanned aerial systems in pre-, active-, and post-wildfire management
Jan 04, 2024Wildfires have emerged as one of the most destructive natural disasters worldwide, causing catastrophic losses in both human lives and forest wildlife. Recently, the use of Artificial Intelligence (AI) in wildfires, propelled by the integration of Unmanned Aerial Vehicles (UAVs) and deep learning models, has created an unprecedented momentum to implement and develop more effective wildfire management. Although some of the existing survey papers have explored various learning-based approaches, a comprehensive review emphasizing the application of AI-enabled UAV systems and their subsequent impact on multi-stage wildfire management is notably lacking. This survey aims to bridge these gaps by offering a systematic review of the recent state-of-the-art technologies, highlighting the advancements of UAV systems and AI models from pre-fire, through the active-fire stage, to post-fire management. To this aim, we provide an extensive analysis of the existing remote sensing systems with a particular focus on the UAV advancements, device specifications, and sensor technologies relevant to wildfire management. We also examine the pre-fire and post-fire management approaches, including fuel monitoring, prevention strategies, as well as evacuation planning, damage assessment, and operation strategies. Additionally, we review and summarize a wide range of computer vision techniques in active-fire management, with an emphasis on Machine Learning (ML), Reinforcement Learning (RL), and Deep Learning (DL) algorithms for wildfire classification, segmentation, detection, and monitoring tasks. Ultimately, we underscore the substantial advancement in wildfire modeling through the integration of cutting-edge AI techniques and UAV-based data, providing novel insights and enhanced predictive capabilities to understand dynamic wildfire behavior.
Actively Learning Reinforcement Learning: A Stochastic Optimal Control Approach
Sep 18, 2023In this paper we provide framework to cope with two problems: (i) the fragility of reinforcement learning due to modeling uncertainties because of the mismatch between controlled laboratory/simulation and real-world conditions and (ii) the prohibitive computational cost of stochastic optimal control. We approach both problems by using reinforcement learning to solve the stochastic dynamic programming equation. The resulting reinforcement learning controller is safe with respect to several types of constraints constraints and it can actively learn about the modeling uncertainties. Unlike exploration and exploitation, probing and safety are employed automatically by the controller itself, resulting real-time learning. A simulation example demonstrates the efficacy of the proposed approach.
UWB Ranging and IMU Data Fusion: Overview and Nonlinear Stochastic Filter for Inertial Navigation
Aug 25, 2023This paper proposes a nonlinear stochastic complementary filter design for inertial navigation that takes advantage of a fusion of Ultra-wideband (UWB) and Inertial Measurement Unit (IMU) technology ensuring semi-global uniform ultimate boundedness (SGUUB) of the closed loop error signals in mean square. The proposed filter estimates the vehicle's orientation, position, linear velocity, and noise covariance. The filter is designed to mimic the nonlinear navigation motion kinematics and is posed on a matrix Lie Group, the extended form of the Special Euclidean Group $\mathbb{SE}_{2}\left(3\right)$. The Lie Group based structure of the proposed filter provides unique and global representation avoiding singularity (a common shortcoming of Euler angles) as well as non-uniqueness (a common limitation of unit-quaternion). Unlike Kalman-type filters, the proposed filter successfully addresses IMU measurement noise considering unknown upper-bounded covariance. Although the navigation estimator is proposed in a continuous form, the discrete version is also presented. Moreover, the unit-quaternion implementation has been provided in the Appendix. Experimental validation performed using a publicly available real-world six-degrees-of-freedom (6 DoF) flight dataset obtained from an unmanned Micro Aerial Vehicle (MAV) illustrating the robustness of the proposed navigation technique. Keywords: Sensor-fusion, Inertial navigation, Ultra-wideband ranging, Inertial measurement unit, Stochastic differential equation, Stability, Localization, Observer design.
Nonlinear Deterministic Observer for Inertial Navigation using Ultra-wideband and IMU Sensor Fusion
Aug 15, 2023Navigation in Global Positioning Systems (GPS)-denied environments requires robust estimators reliant on fusion of inertial sensors able to estimate rigid-body's orientation, position, and linear velocity. Ultra-wideband (UWB) and Inertial Measurement Unit (IMU) represent low-cost measurement technology that can be utilized for successful Inertial Navigation. This paper presents a nonlinear deterministic navigation observer in a continuous form that directly employs UWB and IMU measurements. The estimator is developed on the extended Special Euclidean Group $\mathbb{SE}_{2}\left(3\right)$ and ensures exponential convergence of the closed loop error signals starting from almost any initial condition. The discrete version of the proposed observer is tested using a publicly available real-world dataset of a drone flight. Keywords: Ultra-wideband, Inertial measurement unit, Sensor Fusion, Positioning system, GPS-denied navigation.
Scalable Online Learning of Approximate Stackelberg Solutions in Energy Trading Games with Demand Response Aggregators
Apr 04, 2023



In this work, a Stackelberg game theoretic framework is proposed for trading energy bidirectionally between the demand-response (DR) aggregator and the prosumers. This formulation allows for flexible energy arbitrage and additional monetary rewards while ensuring that the prosumers' desired daily energy demand is met. Then, a scalable (with the number of prosumers) approach is proposed to find approximate equilibria based on online sampling and learning of the prosumers' cumulative best response. Moreover, bounds are provided on the quality of the approximate equilibrium solution. Last, real-world data from the California day-ahead energy market and the University of California at Davis building energy demands are utilized to demonstrate the efficacy of the proposed framework and the online scalable solution.
Intersection-Traffic Control of Autonomous Vehicles using Newton-Raphson Flows and Barrier Functions
Apr 21, 2020
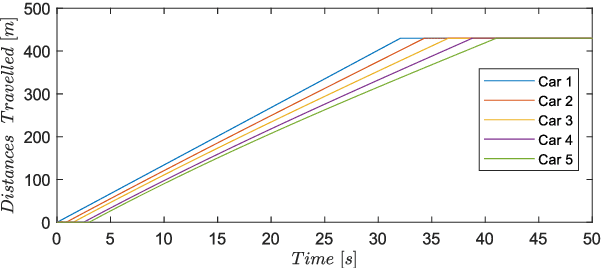
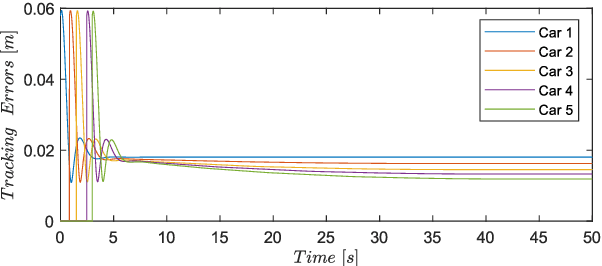

This paper concerns an application of a recently-developed nonlinear tracking technique to trajectory control of autonomous vehicles at traffic intersections. The technique uses a flow version of the Newton-Raphson method for controlling a predicted system-output to a future reference target. Its implementations are based on numerical solutions of ordinary differential equations, and it does not specify any particular method for computing its future reference trajectories. Consequently it can use relatively simple algorithms on crude models for computing the target trajectories, and more-accurate models and algorithms for trajectory control in the tight loop. We demonstrate this point at an extant predictive traffic planning-and-control method with our tracking technique. Furthermore, we guarantee safety specifications by applying to the tracking technique the framework of control barrier functions.