 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Tracking Control for Computationally Constrained Aerial Systems with the Newton-Raphson Method
Aug 19, 2025We investigate the performance of a lightweight tracking controller, based on a flow version of the Newton-Raphson method, applied to a miniature blimp and a mid-size quadrotor. This tracking technique has been shown to enjoy theoretical guarantees of performance and has been applied with success in simulation studies and on mobile robots with simple motion models. This paper investigates the technique through real-world flight experiments on aerial hardware platforms subject to realistic deployment and onboard computational constraints. The technique's performance is assessed in comparison with the established control frameworks of feedback linearization for the blimp, and nonlinear model predictive control for both quadrotor and blimp. The performance metrics under consideration are (i) root mean square error of flight trajectories with respect to target trajectories, (ii) algorithms' computation times, and (iii) CPU energy consumption associated with the control algorithms. The experimental findings show that the Newton-Raphson flow-based tracking controller achieves comparable or superior tracking performance to the baseline methods with substantially reduced computation time and energy expenditure.
Newton-Raphson Flow for Aggressive Quadrotor Tracking Control
Aug 20, 2024



We apply the Newton-Raphson flow tracking controller to aggressive quadrotor flight and demonstrate that it achieves good tracking performance over a suite of benchmark trajectories, beating the native trajectory tracking controller in the popular PX4 Autopilot. The Newton-Raphson flow tracking controller is a recently proposed integrator-type controller that aims to drive to zero the error between a future predicted system output and the reference trajectory. This controller is computationally lightweight, requiring only an imprecise predictor, and achieves guaranteed asymptotic error bounds under certain conditions. We show that these theoretical advantages are realizable on a quadrotor hardware platform. Our experiments are conducted on a Holybrox x500v2 quadrotor using a Pixhawk 6x flight controller and a Rasbperry Pi 4 companion computer which receives location information from an OptiTrack motion capture system and sends input commands through the ROS2 API for the PX4 software stack.
Intersection-Traffic Control of Autonomous Vehicles using Newton-Raphson Flows and Barrier Functions
Apr 21, 2020
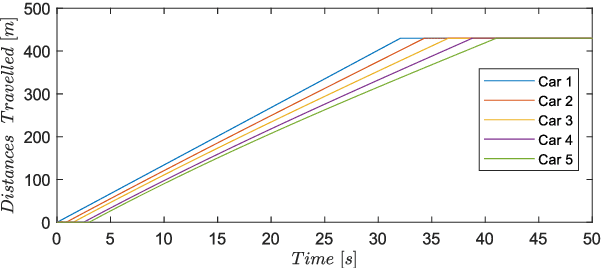
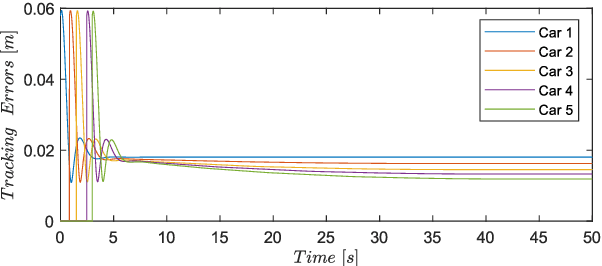

This paper concerns an application of a recently-developed nonlinear tracking technique to trajectory control of autonomous vehicles at traffic intersections. The technique uses a flow version of the Newton-Raphson method for controlling a predicted system-output to a future reference target. Its implementations are based on numerical solutions of ordinary differential equations, and it does not specify any particular method for computing its future reference trajectories. Consequently it can use relatively simple algorithms on crude models for computing the target trajectories, and more-accurate models and algorithms for trajectory control in the tight loop. We demonstrate this point at an extant predictive traffic planning-and-control method with our tracking technique. Furthermore, we guarantee safety specifications by applying to the tracking technique the framework of control barrier functions.