 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-step and Resilient Predictive Q-learning Algorithm for IoT with Human Operators in the Loop: A Case Study in Water Supply Networks
Jun 06, 2020



We consider the problem of recommending resilient and predictive actions for an IoT network in the presence of faulty components, considering the presence of human operators manipulating the information of the environment the agent sees for containment purposes. The IoT network is formulated as a directed graph with a known topology whose objective is to maintain a constant and resilient flow between a source and a destination node. The optimal route through this network is evaluated via a predictive and resilient Q-learning algorithm which takes into account historical data about irregular operation, due to faults, as well as the feedback from the human operators that are considered to have extra information about the status of the network concerning locations likely to be targeted by attacks. To showcase our method, we utilize anonymized data from Arlington County, Virginia, to compute predictive and resilient scheduling policies for a smart water supply system, while avoiding (i) all the locations indicated to be attacked according to human operators (ii) as many as possible neighborhoods detected to have leaks or other faults. This method incorporates both the adaptability of the human and the computation capability of the machine to achieve optimal implementation containment and recovery actions in water distribution.
Intersection-Traffic Control of Autonomous Vehicles using Newton-Raphson Flows and Barrier Functions
Apr 21, 2020
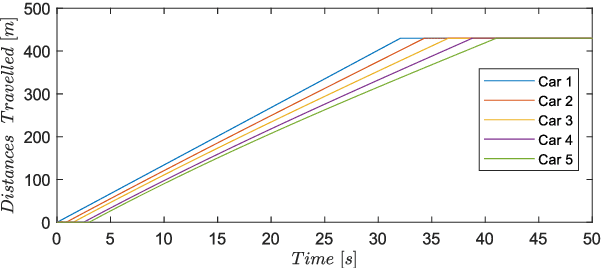
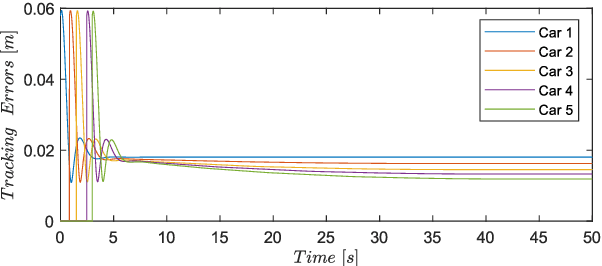

This paper concerns an application of a recently-developed nonlinear tracking technique to trajectory control of autonomous vehicles at traffic intersections. The technique uses a flow version of the Newton-Raphson method for controlling a predicted system-output to a future reference target. Its implementations are based on numerical solutions of ordinary differential equations, and it does not specify any particular method for computing its future reference trajectories. Consequently it can use relatively simple algorithms on crude models for computing the target trajectories, and more-accurate models and algorithms for trajectory control in the tight loop. We demonstrate this point at an extant predictive traffic planning-and-control method with our tracking technique. Furthermore, we guarantee safety specifications by applying to the tracking technique the framework of control barrier functions.